Inspiration
In our school I always noticed two cans next to each other, the trash and recycling. Even though the recycling can is right there I would always see paper, bottles, and other things that should belong in the recycling can ending up in the trash.
What it does
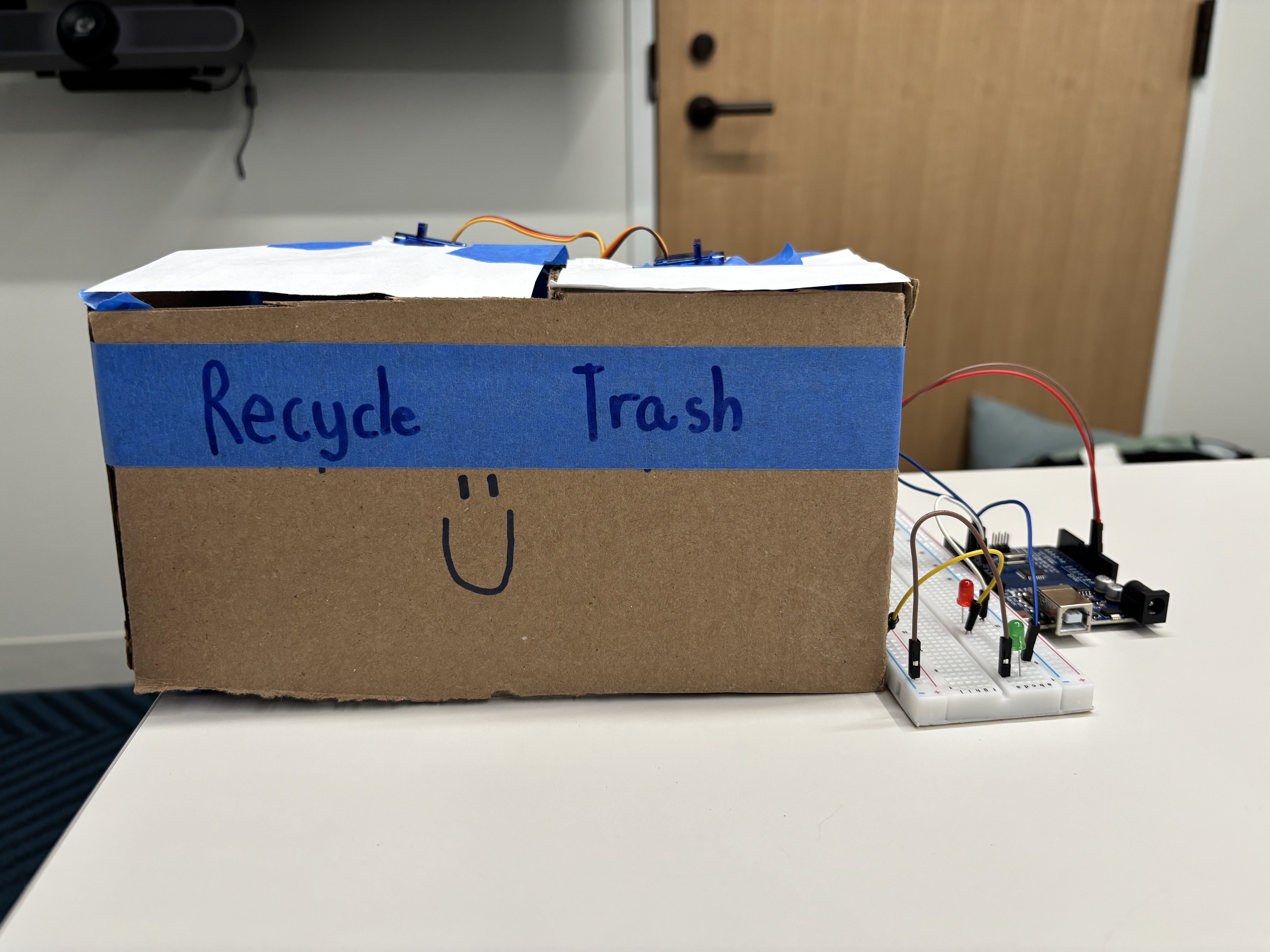
This project uses a computer running YOLOv5(object detection model) to automatically check whether an object is trash or recycling then sends the signal to the arduino where it uses a servo to open up the trashcan
How we built it
(Dataset: https://universe.roboflow.com/grpglmthesis/thesis-unztx/dataset/19)
Computer part: Yolov5 + OpenCV Pyserial
Hardware: Cardboard and painters tape Arduino Uno 2 x LED 2 x Servos
Challenges we ran into
Some challenges we ran into was that the
- Model had a lot of false accuracy so I had to tone down the confidence percentage.
- The stepper motors were very weak so instead of a cardboard top I had to use paper
Accomplishments that we're proud of
Being able communicate using Arduino and yolov5
What we learned
I learned how to tune models even after training so that it could accurately find
What's next for BinSense
- Switching to a raspberry pi so that everything can run directly on site
- Making our own accurate dataset
Built With
- arduino
- pyserial
- yolov5
- zed

Log in or sign up for Devpost to join the conversation.