-
Let the bin come to you!
-

-


Inspiration
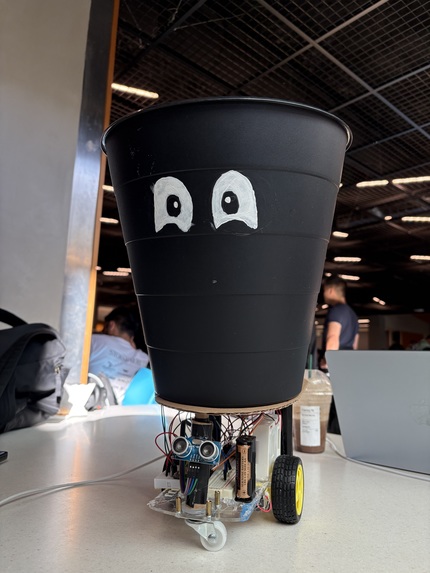
We wanted to make cleaning up fun, turning an ordinary trash bin into a friendly, autonomous companion that encourages people not to litter. Instead of chasing the bin, Binibot brings the bin to you.
What it does
Binibot detects nearby humans using a camera and lightweight AI model, follows them like a curious pet, and stops when they’re close enough to throw something away. Using onboard sensors, it can explore, avoid obstacles, and return to roaming mode when done, all in the name of eco-friendliness.
How we built it
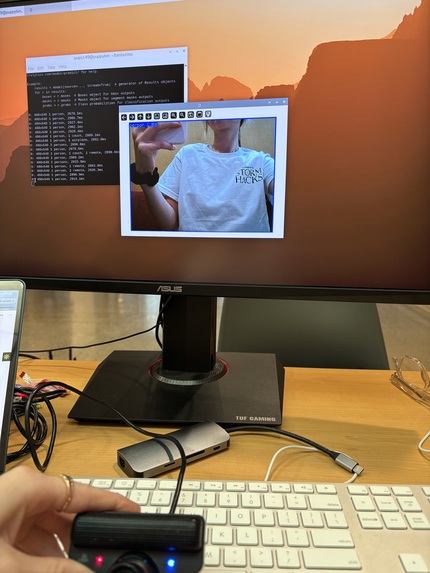
- Raspberry Pi 4: runs YOLOv8 for person detection and a simple state machine for behavior (EXPLORE, FOLLOW, WAIT, AVOID).
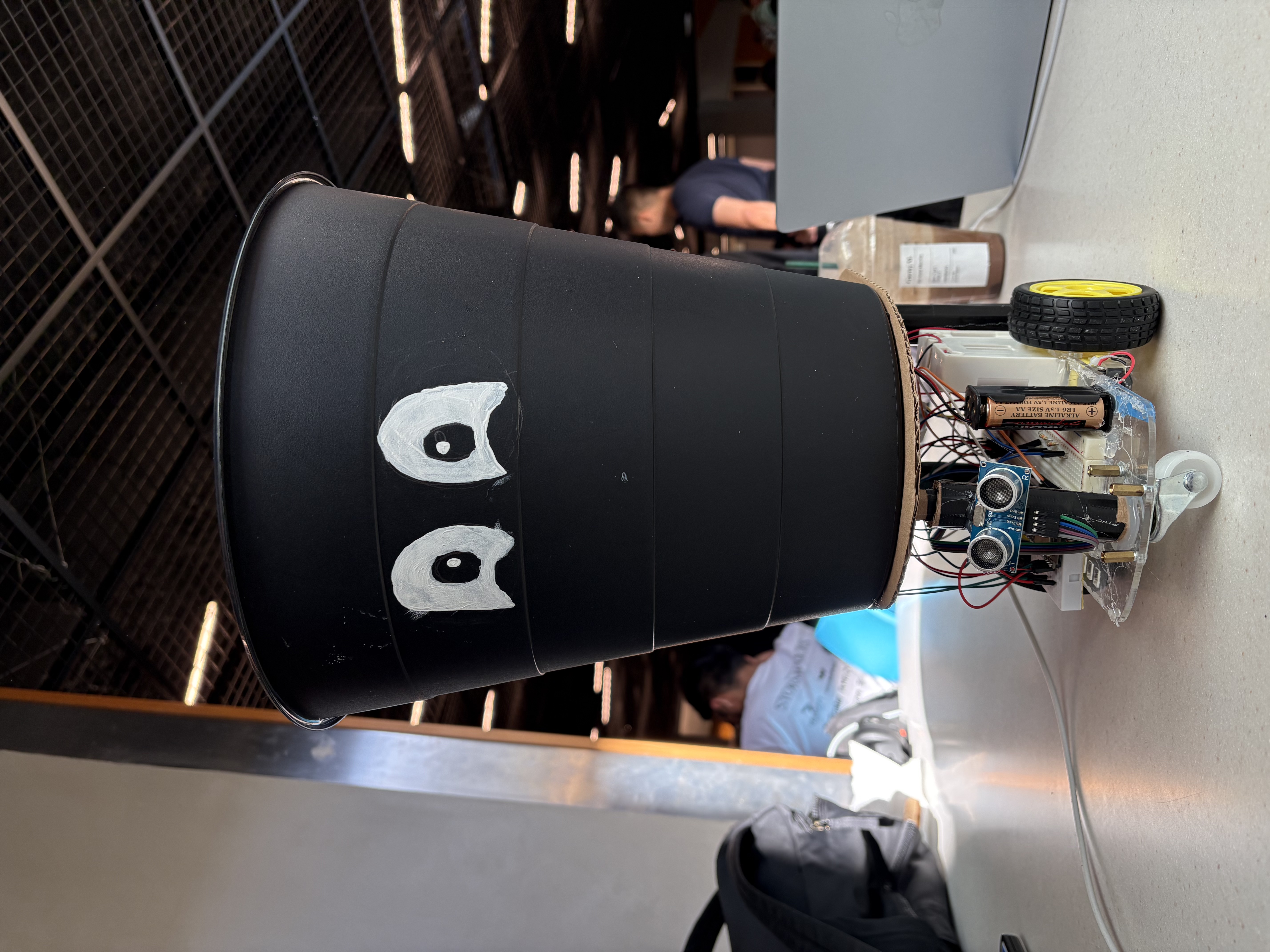
- ESP32-C6: receives velocity commands via UDP and drives the motors through a SparkFun TB6612FNG driver.
- Sensors: HC-SR04 for obstacle avoidance; PlayStation Eye webcam for vision.
- Software: Python (OpenCV, Ultralytics), PlatformIO (C++ for ESP32), and a lightweight UDP link for communication.
- Systemd keeps the Pi-side control loop running automatically on boot.
Challenges we ran into
- Wi-Fi instability: campus networks blocked UDP packets, requiring a direct hotspot connection.
- Model latency: YOLOv8n had to be downsampled to 320 px for real-time inference.
- Power management: balancing current draw between motors and sensors on a small platform.
- System integration: syncing the camera, ultrasonic, and motor timing across two microcontrollers.
Accomplishments that we're proud of
- A fully working person-following robot powered by a Raspberry Pi and ESP32.
- Achieved real-time detection and tracking entirely on the edge (no cloud).
- Clean modular code structure (FSM + UDP + tracking).
- Stable autonomous behavior transitions: EXPLORE → FOLLOW → WAIT.
What we learned
- Running computer vision efficiently on limited hardware.
- Integrating asynchronous communication between two microcontrollers.
- Using systemd to deploy and manage autonomous processes.
- Tuning PID-like motion control from high-level AI outputs.


Log in or sign up for Devpost to join the conversation.