-
-

-
TEST
-
PCT/IR2025/050026
-



Inspiration
The concept of artificial intelligence was first announced in the United States in 1956. When engineers sought to create computers that mimic human thought processes, Jack McCarthy claimed that machines could behave like humans. And artificial intelligence means that a computer learns to think and do things like humans, for example: look at images and recognize. The similarity of artificial intelligence and the human brain indicates a search for a better understanding of the functioning of the mind by building systems using information similar to the human brain. Experts have always tried to align this function. But the function of the brain has not been accurately simulated. We were inspired by the basic principles and function of the human brain in processing data in the thalamus and the two cerebral hemispheres and the role of the corpus callosum as an interface between the two hemispheres in exchange and coordination, and the implementations and initial results have been very impressive because they show technical and operational superiority and efficiency over today's models. It allows the eagle to see objects from far distances with high vision. This feature is due to the special function of the eagle's eye, which includes an expanded retina, a concave-convex orbit that acts as a lens and enlarges the image and increases the visual acuity, so that the reason for this structure and about one and a half million optic nerves. Structure and use of the eyeball
What it does
1) Intelligent communication networks: Systems that adjust their performance and optimize communications based on environmental changes. 2) Security systems: Circuits that can encrypt or transmit information based on environmental changes. 3) Advanced applications of this system can be used for electronic skin, advanced sensors or self-organizing documents. 4) Energy management: The use of piezoelectric materials allows the exploitation of environmental energy for the operation of the system. Electronic skin: Acceptable materials controlled by artificial intelligence and can act as skin sensors. 5) Technical and engineering sciences: Predicting electrical load consumption 6) Troubleshooting industrial and technical systems 7) Designing various control systems 8) Designing and optimizing technical and engineering systems 9) Optimal decision-making in engineering projects 10) Financial markets 11) Forecasting stock prices and stock market indices 12) Analysis, evaluation and interpretation of capital and credit 13) Experimental and biological sciences: 14) Predictive modeling of biological and environmental phenomena 15) Identifying hidden and recurring patterns in nature 16) Medical sciences: 17) Modeling biomedical processes 18) Diagnosing diseases based on the results of medical tests and medical images 19) Predicting treatment outcomes 20) Detecting damage or cracks in engineering structures
How to build it
Why is the invention of the two-hemisphere neural network the most fundamental and undeniable invention in the world? One of the most interesting topics that made me think about the architecture of the two-hemispheric neural network . The work was the architecture and implementation of a humanoid robot. I think about implementing a robot that behaves like a human. The first possible task was to investigate the existing problems in the field of artificial intelligence and robotic neural networks. Inefficient processing of complex patterns, high energy consumption, high computational cost, low processing speed, interpretability, training, vision, lack of better understanding of patterns and illusions of artificial intelligence were the main problems that I became involved with in this field. With the solutions used in convolutional networks, Möbius transformations in Poincaré space were real edge problems.
With the solutions used in convolutional networks, Mobius transformations in Poincaré space, edge problems, information loss was actually a big challenge. Until I turned to studying the biological solution of the initial model of this knowledge. The basic basis that McCarthy, the father of artificial intelligence in America, had first stated. Machines can show human-like behavior and learn artificial intelligence, that is, computers. Think and do things like humans. Look at images and recognize like humans. In fact, modern science has always been trying to, but in fact we were far from it. Looking at the function of the brain, data is amplified, filtered and categorized in the thalamus of the brain and acts in two output vectors and processed separately and in harmony in the two hemispheres with the role of the corpus callosum (Corpus callosum) as a linker and information exchange center of the two hemispheres. In fact, when a person reads a text, the left hemisphere processes words and sentences, and the right hemisphere helps to understand the overall text and its relationship with the person's previous knowledge. This is an undeniable fact in brain processing. And in fact, in today's knowledge, the role of the thalamus and how to process patterns in the human brain separately and in harmony, and the role of the corpus callosum has been ignored. By comparing the technical problems in existing networks and the human brain, the issue becomes completely clear. Scientific studies in neuroscience suggest that disorders in the thalamus and the absence of the corpus callosum cause: 1) Expressing false information but believing it (delusions in AI) 2) Problem solving problems (weakness in multi-step reasoning and generalization) 3) Problems with advanced activities 4) Difficulty understanding abstract concepts 5) Delayed learning 6) Delayed speech and language skills 7) Inability to maintain concentration 8) Difficulty understanding the perspective of others 9) Visual impairments Slowness in focusing and recognizing complex patterns is mild mental retardation. Accordingly, the two-hemisphere neuromorphic neural network was invented, which has the most accurate resemblance to brain processing and solves technical problems.
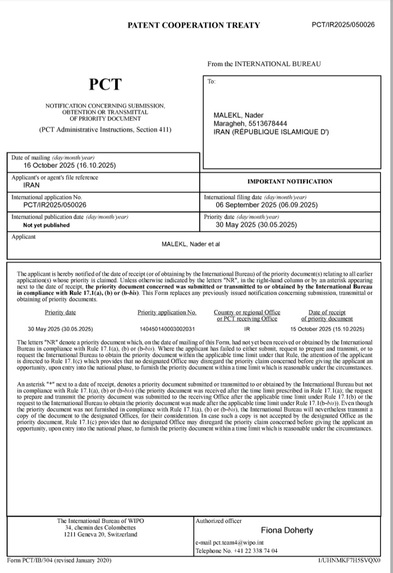
Solving technical problems in the field of artificial intelligence and registering the international patent PCT/IR2025/050026, and fundamental and scientific innovation in the new model of the two-hemispheric neural network, piezoelectric memory sensors and smart circuits, and solving more problems in the illusion of artificial intelligence, real-time decision-making in robotics and other innovations that were fundamental rather than improving a method, and donating 80% of the benefits of this project and associations supporting orphaned children around the world were among my
Challenges we faced.
Because this project was completely innovative in designing a new network with memory sensors and smart circuits, unfortunately the pride of some professors prevented them from providing advice on construction, and in fact, the big challenge was that not everyone can build this system, and the second biggest challenge was coding the network. I had completed the system architecture and had a patent and expert approval, but coding the network was a big challenge, so I had to learn to code myself around the clock. Honesty was my best policy and saved me from challenges.
Achievements we are proud of:
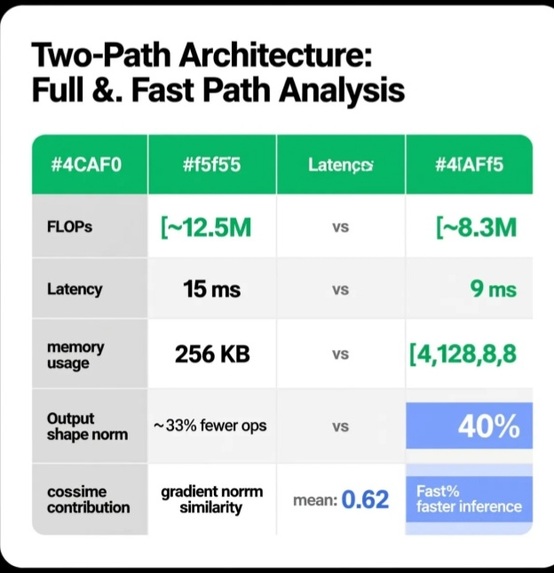
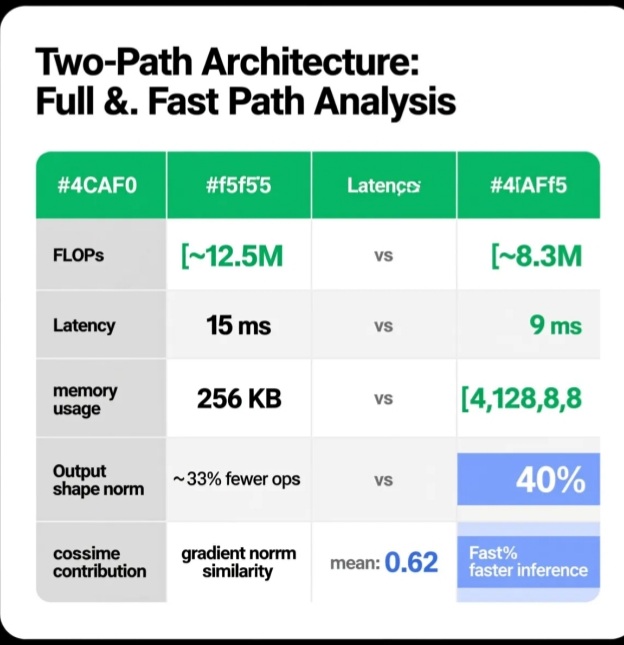
Building a new neural network is of great importance in the field of artificial intelligence, because each new architecture can break the limitations of the previous generation and open new paths for scientific and industrial applications. From a legal point of view, the inventor of a new neural network in this field means that you must have a superior leaf over previous knowledge, and from a scientific point of view, you are considered the first person in artificial intelligence, because a network architect must master the entire structure in order to design and register the new network, and this is considered the greatest scientific achievement in this field. Solving a high percentage of the illusion of artificial intelligence and initial network tests and providing a superior answer to prior knowledge in terms of energy consumption, processing complex patterns, high speed in training and the possibility of adapting to existing networks, self-organizing the network, real-time decision-making in robotics, increasing the accuracy, efficiency and interpretability of the system, and registering the global PCT/IR2025/050026and registering the paper at the biennial seminar on artificial intelligence and data science. Donating and assigning 80% of the total profits of this invention to associations supporting orphaned children and women heads of households around the world was my best achievement from this invention.
Built With
- https://github.com/nadermalki/kingmazda1111/issues/5#issue-3382903784
- nader.maleki.al@gmail.com








Log in or sign up for Devpost to join the conversation.