Inspiration
The Spanish ARMada
What it does
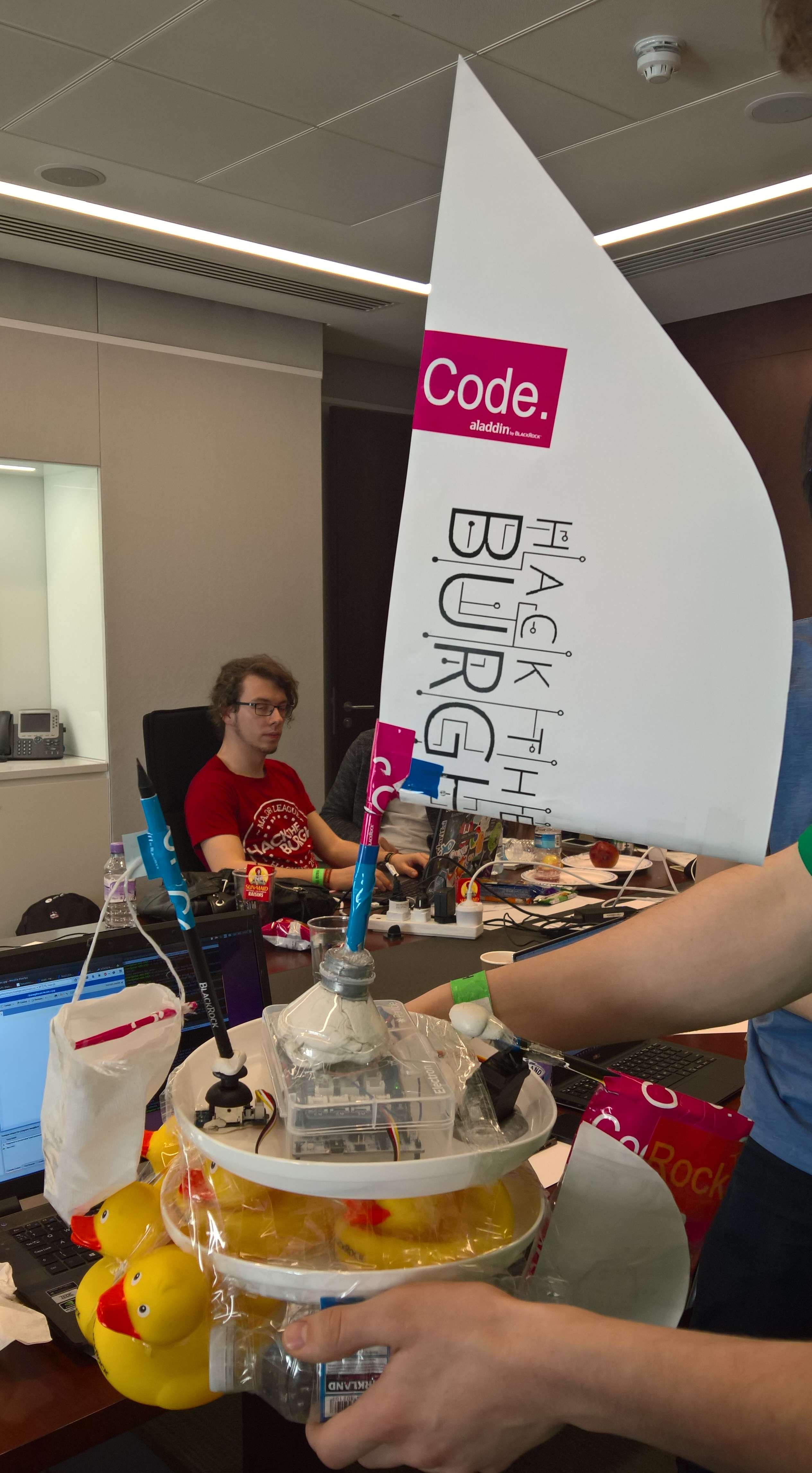
A self-sailing fleet of ducks powered by ARM mbed technology and swag
How we built it
With lots of ducks and tape and code
What's next for Best ARMada of Duck And Self-sailing Swag (BADASS)
Built With
- arm
- ducks
- mbed





Log in or sign up for Devpost to join the conversation.