-
-
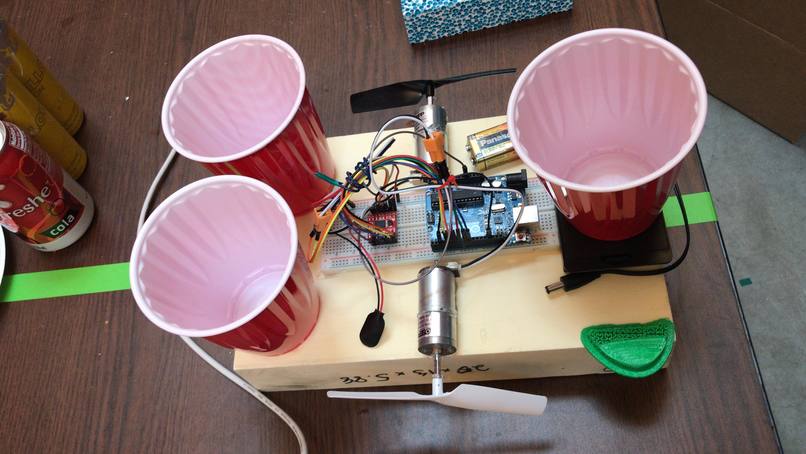
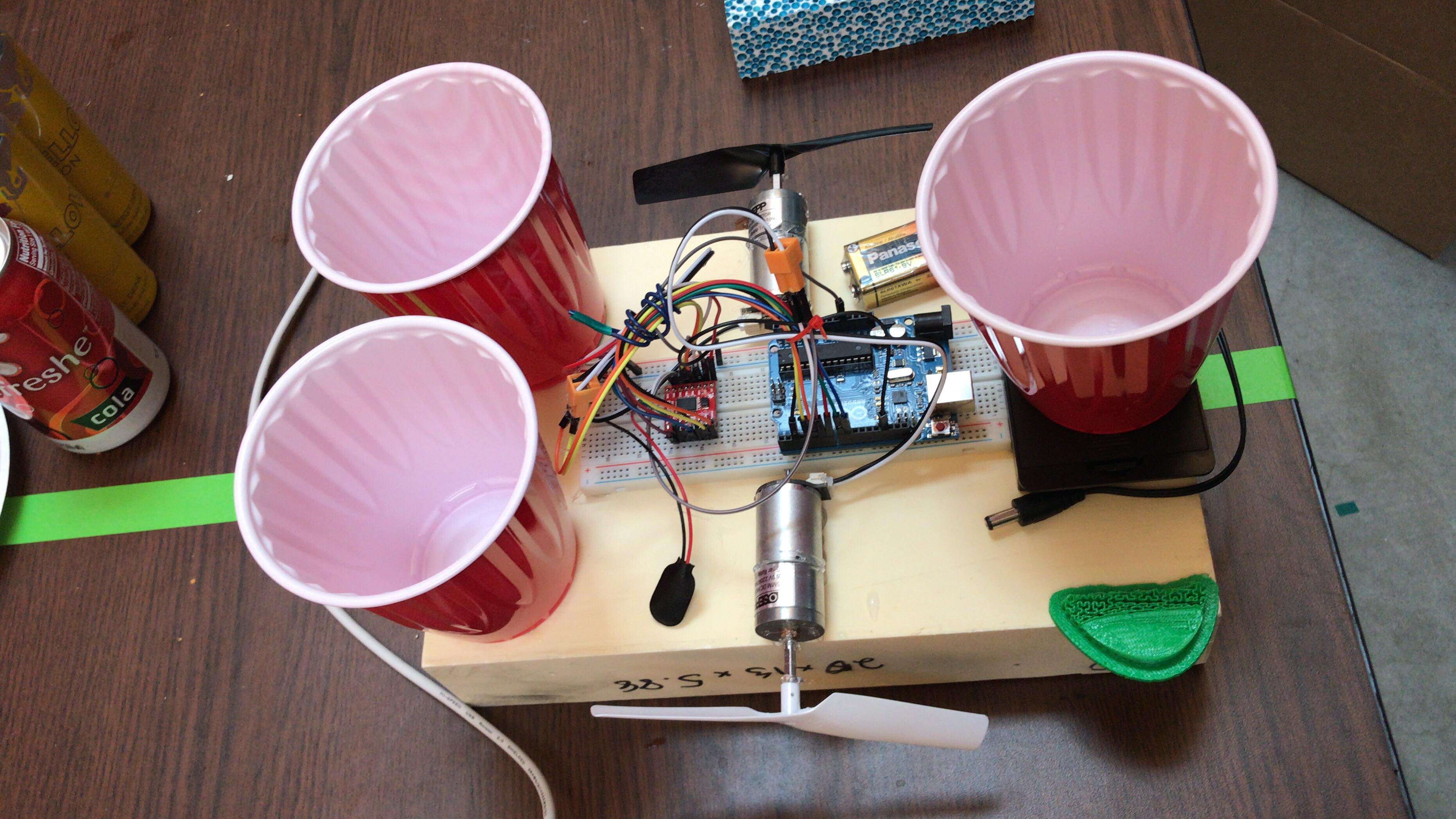
The drone itself, with the beer pong cups
-
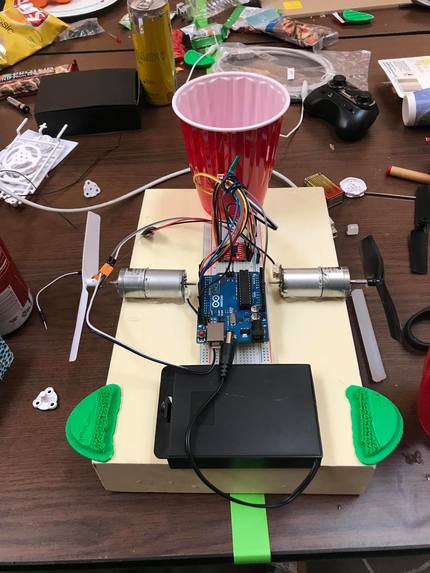
The back of it
-
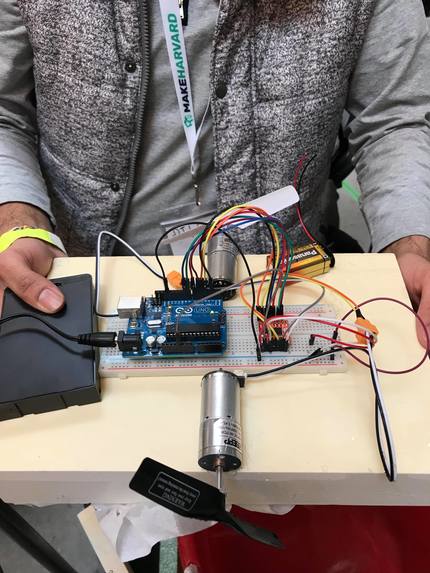
A working prototype

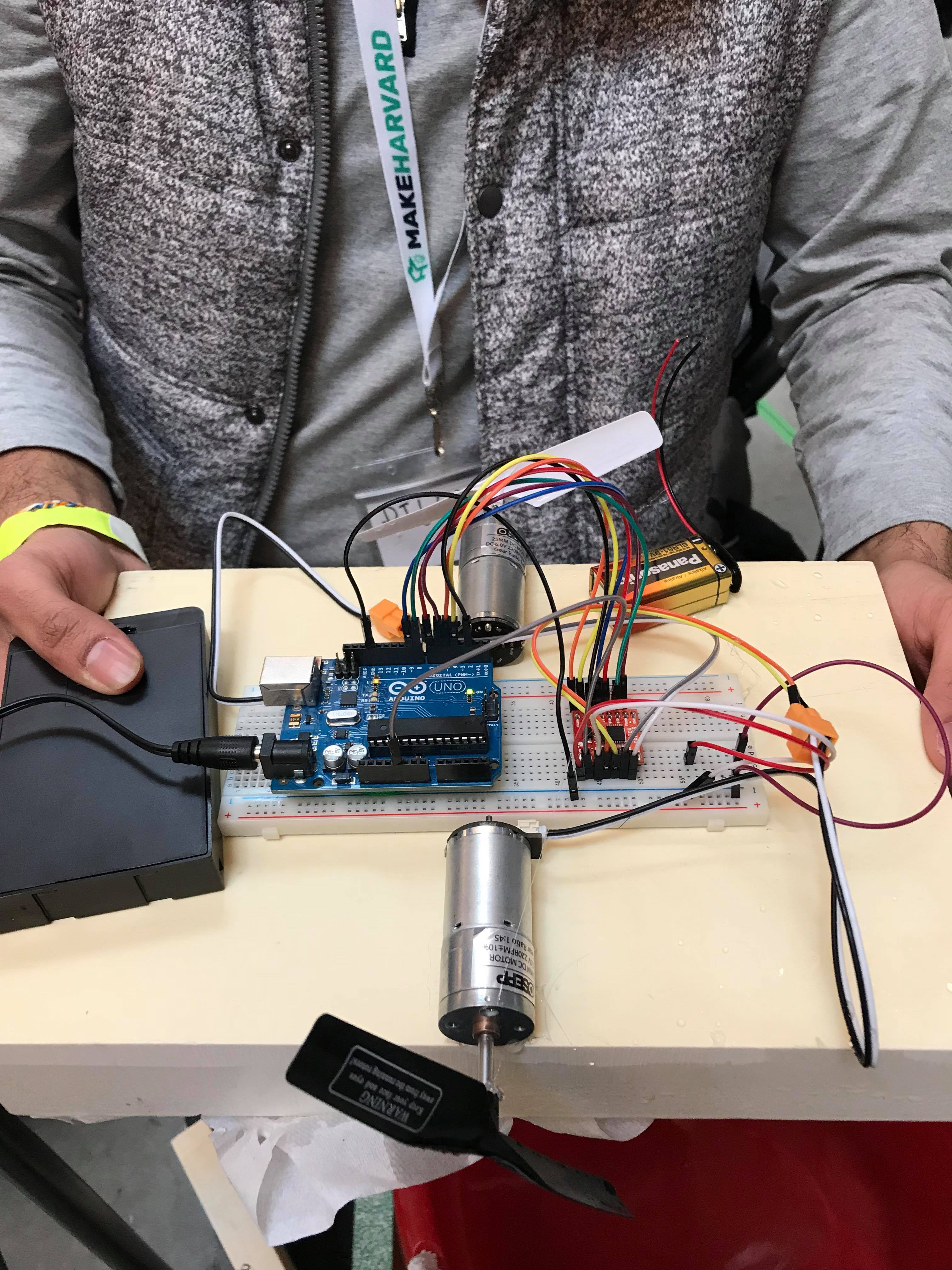
Inspiration
Unlike traditional Beer pong, Beer Pong Drone (BPD) has a moving target that’s preprogrammed to evade its players Designed to be use in pools or other water environments, BPD is sure to be the game for everyone to enjoy with their friends and coworkers!
What it does
A drone that swims in a linear path underwater, and can curve left and right using its propellers Has cup holders that allow for playing beer pong Powered using a motor to drive Connected using an Uno Arduino module
How I built it
Arduino Uno Potentiometer DC Motor 9V Battery
Challenges I ran into
Our biggest challenge was figuring out how to power the propellers using a DC motor.
First we tried Adafruit ESP 8266 to send signals to the motors using a Wifi-Communication protocol. However, while trying to do a Blink Test using Arduino, we realised that our GRD pin had been shaved off while soldering.
Trying to push GRD pin to make it the same size as the others, we headed to the soldering station. We were disappointed when the solder had solidified and the machine wasn’t hot enough to melt more solder.
Abandoning the idea of wireless communication, we moved to using a Mega Arduino to connect to our DC Motor. We used the Blink test to set it up-- it worked! However, we finally went with the Arduino Uno because the online resources available for it were more descriptive and abundant. We wanted to make sure our connections would be foolproof, and we wanted a measure of safety and sureness in our connections so we could use creativity and risk while changing the speed of the propellers using a potentiometer.
Accomplishments that I'm proud of
What a potentiometer essentially allowed us to do was make turns in the water. We used it because it allows us to choose how much power to give each propeller, expressed as a percentage. We used this to create a difference in power supplied which allowed us to make turns around curves. This happens because we can slow down the left propeller while making a turn leftwards, so that the robot veers towards the left because it allows the robot to momentarily pivot. Conceptually, it functions the same way as a door hinge.
What I learned
Setting up the potentiometer was a challenge too, because we had to hardcode in the Arduino command line what percentage corresponded to how much power, for each fin. This also involves taking in input from the user, so we had to code functions for that. We thought of what would be most convenient to the user. I learnt to be resilient and work in teams.
What's next for Beer Pong Drone
We chose to make a BPD because it has incredible potential to be developed! Possible ways we brainstormed were: -- Applications to learning! For kids to have a fun way to learn Calculus by making weird paths in the water and being asked how they would find that path. We would attach an accelerometer to the drone so that we could integrate that to get the path of the drone! --Applications to Ocean Conservation: Using sound sensors and developing a SONAR system for obstacle detection: used for trash pickup in the ocean!


Log in or sign up for Devpost to join the conversation.