-
-
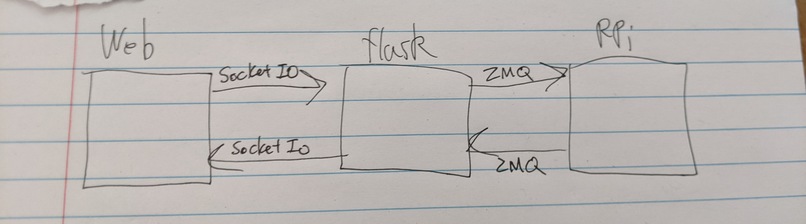
Network Diagram
-

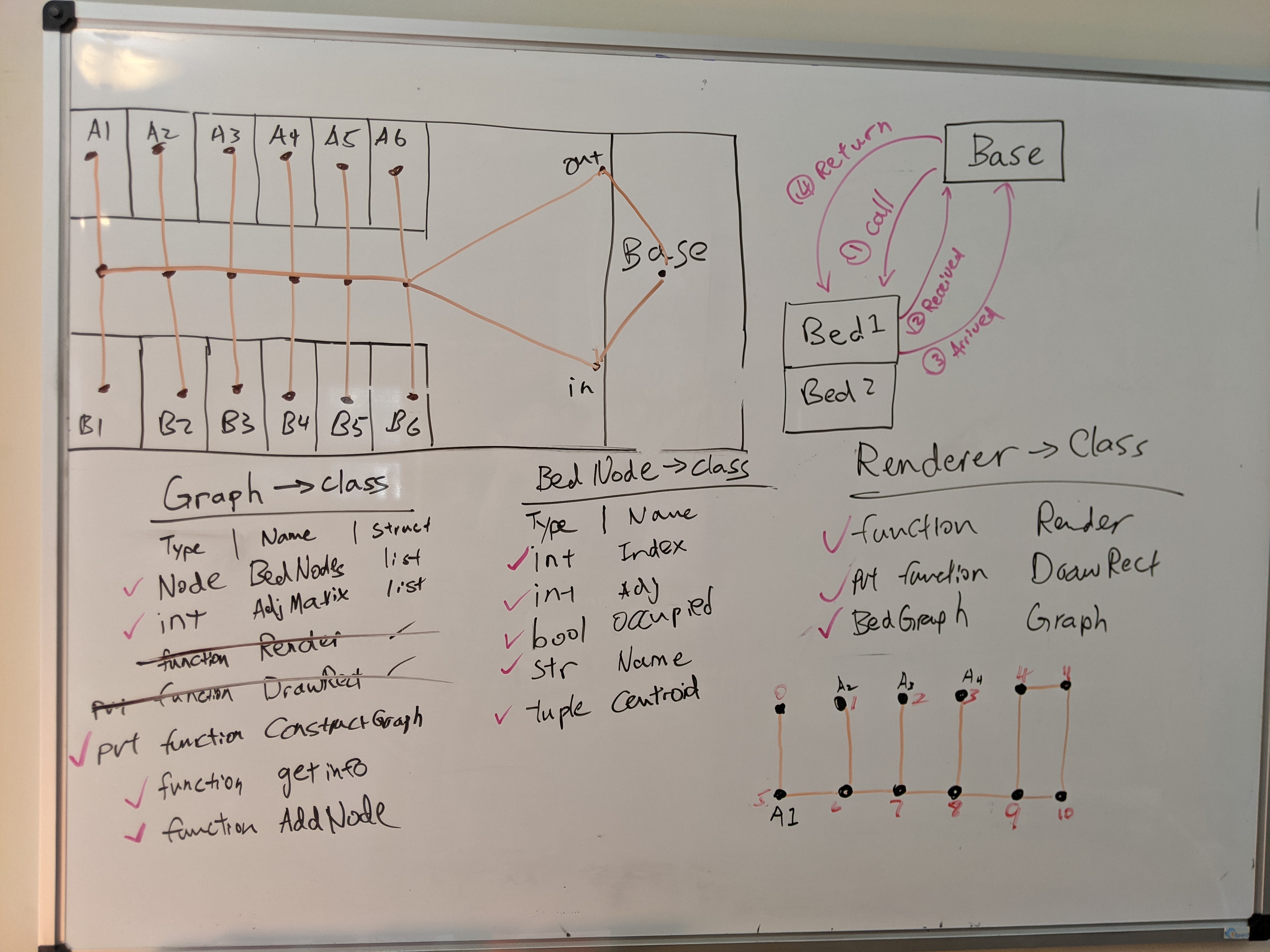
Large scale graph example and class structure for LED Simulation
-
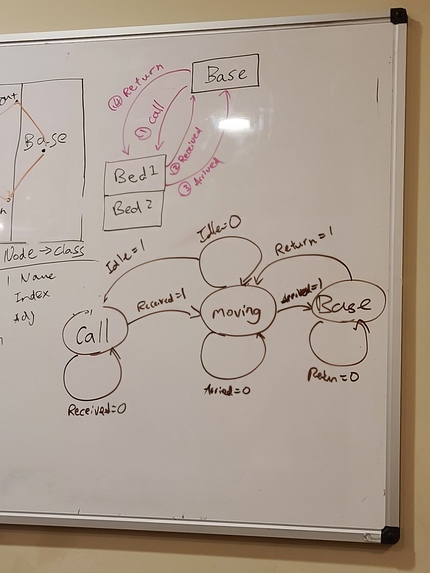
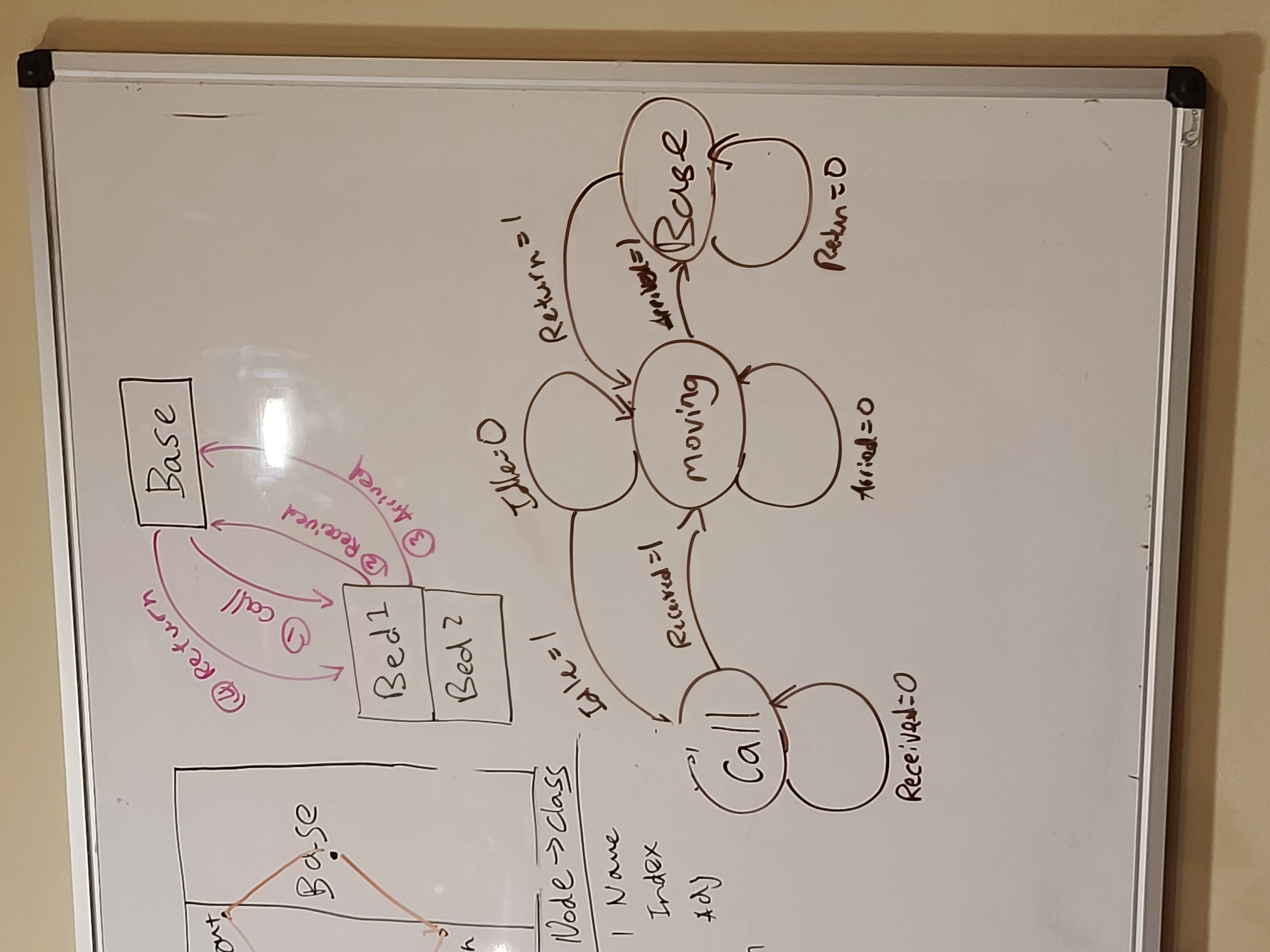
State diagram of the robot <-> webserver communication

Inspiration
At the height of COVID, emergency medical centers around the world were constructed to keep up with the significant increase of patients (temporary hospitals in parking lots, stadiums, etc...). This put many healthcare workers and patients at risk as they are enclosed in a space with the infected. Personal Protection Equipment (PPE) also ran low as all healthcare workers involved had to wear full protection. Our proposed solution to this problem is to have a system where patients' beds are automatically moved and brought to the healthcare workers instead of them having to be in an enclosed space with the infected patients. This will reduce the risk of infection to the worker and decrease the use of PPE as only the doctors interacting with the patients needs the equipment. We can also maximize the space in these temporary hospitals because there's less foot traffic.
What it does
Our projects simulate the beds on a hospital floor, and how a robot could use our proposed solution. We use a breadth first search algorithm to determine an optimal path for the bed to take to get to an operating room, and then the bed starts going. As the robot moves, it updates the web client on its current status.
How we built it
This project is built with a raspberry pi acting as the controller for an LED screen. The PI uses this library to address individual pixels: https://github.com/hzeller/rpi-rgb-led-matrix This library is used to create a frame-by-frame rendering of the whole scene. The PI is controlled by a webserver running flask, and there is a web based GUI to send commands to the robot.
Challenges we ran into
We had lots of issues during this project. Setting up stable communication between the web interface running on my laptop, and the raspberry pi proved to be quite challenging. On the raspberry pi, we ran into issues with the drivers, and our wiring which shorted which we had to fix. We also ran into discoloration issues that make the screen look very strange.
Accomplishments that we're proud of
- Created a proof of concept that works!
- Accomplished all of our goals (Finish network communication, path finding algorithm, and paper)
- Had Fun~!!
What we learned
Our team started this project at varying levels of programming knowledge, and so we all learned tons by working on this. We learned about Git, Github, python, flask, networking, javascript, raspberry pis, abstracting problems into a mathematical solution, frame by frame rendering on LED screen, application of graph traversal.
Built With
- c
- cpython
- flask
- html
- javascript
- jquery
- python
- raspberry-pi
- rendering
- zmq






Log in or sign up for Devpost to join the conversation.