
Inspiration
When we picture ourselves at the seaside on vacation, we imagine a clean seashore with clear water. But, in reality, this is never the case, as marine pollution has become one of humanity's biggest concerns. Thanks to human negligence, most of the beaches on our planet are littered with plastic and non-biodegradable trash, which eventually reach the sea and damage the marine ecosystem. As fellow stewards of this Earth, we were inspired to build something that can help restore beaches and protect sea life.
What it does
The automated smart rover built by us moves around the beach to identify and pick up trash. The wheels of the rover are potent enough to move across dry as well as wet sand. The camera of the Raspberry pi 4 used in this rover takes an image of the material, and then it sends that image to Google Cloud. With the help of Google's CloudVision API, it identifies what is there in the image and returns it to my client. Depending upon the type of that object, the program classifies it as either trash or not. If the object gets identified as trash, then the rover picks it up, moves, and gathers them to a specific corner away from the seashore, making it easy for the garbage collector to collect the whole trash of the site at once. And the rover keeps repeating the process of picking up trash and moving it near a trashcan until the entire area (in this case, the beach shore) is clean and free of plastic.
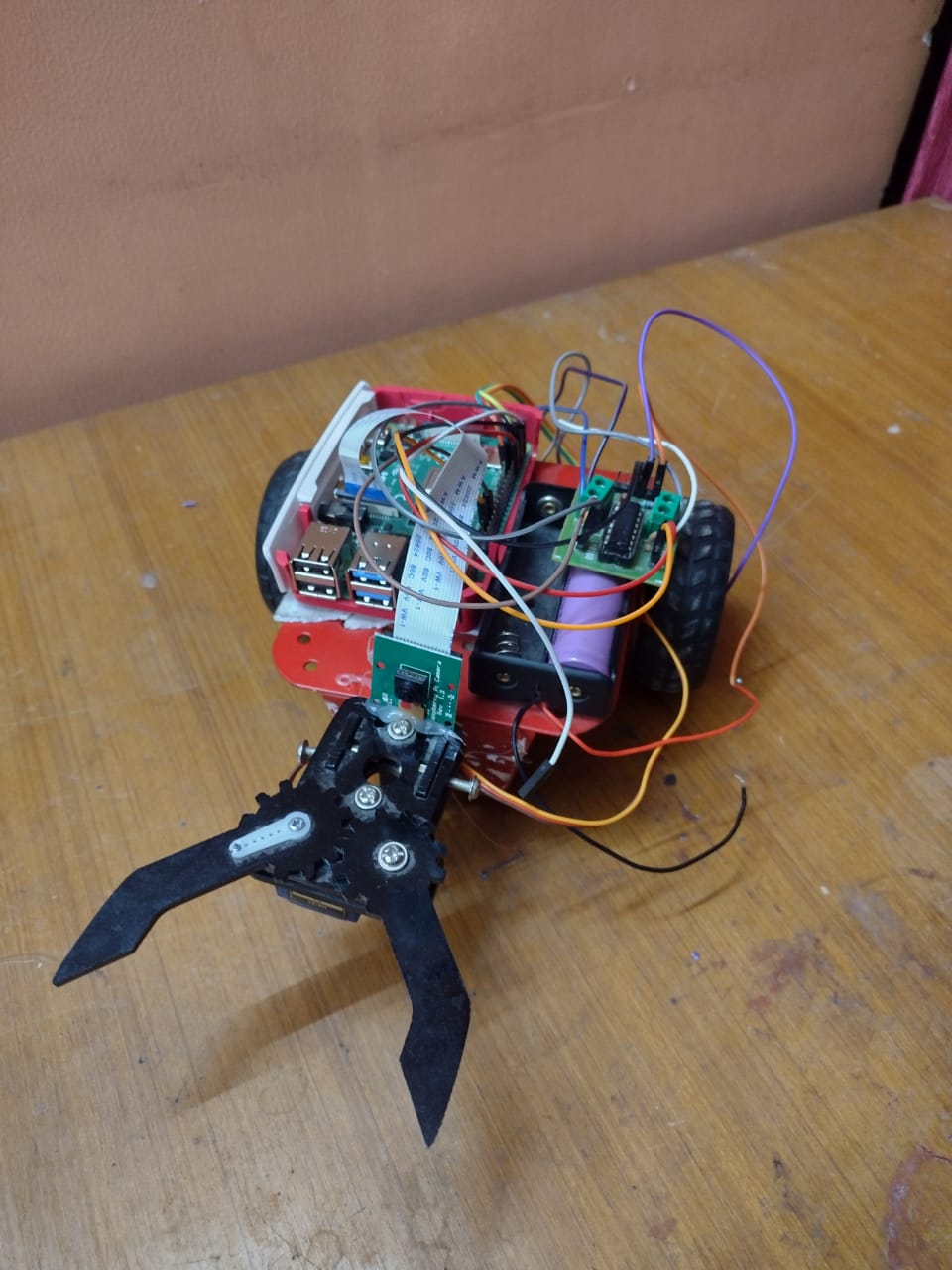
How we built it
The heart of the rover is the Raspberry pi 4, and along with it, we are using the RPI cam. We have used two motors for the movement, and for the picking mechanism, we used a micro servo motor. We used an l293d as the Motor Driver, which drives the motors. With the help of Google Cloud Vision Object Detection API and some python code for driving the motor driver, we merged both the API code for the object detection and the robot's movement. Next, we calibrated the rover with threshold values, such as for the movement or tuning the triggering of the servo.
Challenges we ran into
One of the mentionable challenges faced while building the project was that it was our first time interfacing the l293d motor driver with the Raspberry pi. Then configuring the servo with the R-pi and making it work correctly was another hurdle we had to overcome. Merging the API code with the main code was a bit tricky. Finally, some troubleshooting and bug fixing was also nerve-wracking for sure.
Accomplishments we are proud of
Driving the l293d Motor Driver and the Servo Motor with the Raspberry pi was an accomplishment in itself. Being able to make the object detection API work correctly so that it could identify trash was something that we are very proud of doing. One of the most celebratory moments for us was watching the bot working correctly upon merging the Object Detection API with the main Driver Code.
What's next for Beach, please
In the future, we are planning to upgrade our rover with a trash bin detection capability which will allow the garbage to be gathered near a dustbin/trashcan or put the trash inside that. We will also add a web portal to our project, which will allow us to control the rover in a semi-autonomous configuration. In the web portal, there will be buttons to allow the user to communicate with the rover. Further, we will be improving the architecture of the rover as well, so that it can pick up multiple trash at once, which will reduce the number of turns it has to take to reach the dustbin/trashcan, hence improving the rover's efficiency.
Citations
https://cloud.google.com/vision/automl/object-detection/docs
https://devpost.com/software/smartbin-qkcliw
Built With
- computer-vision
- google-cloud-vision
- iot
- python
- raspberry-pi
- servo











Log in or sign up for Devpost to join the conversation.