-
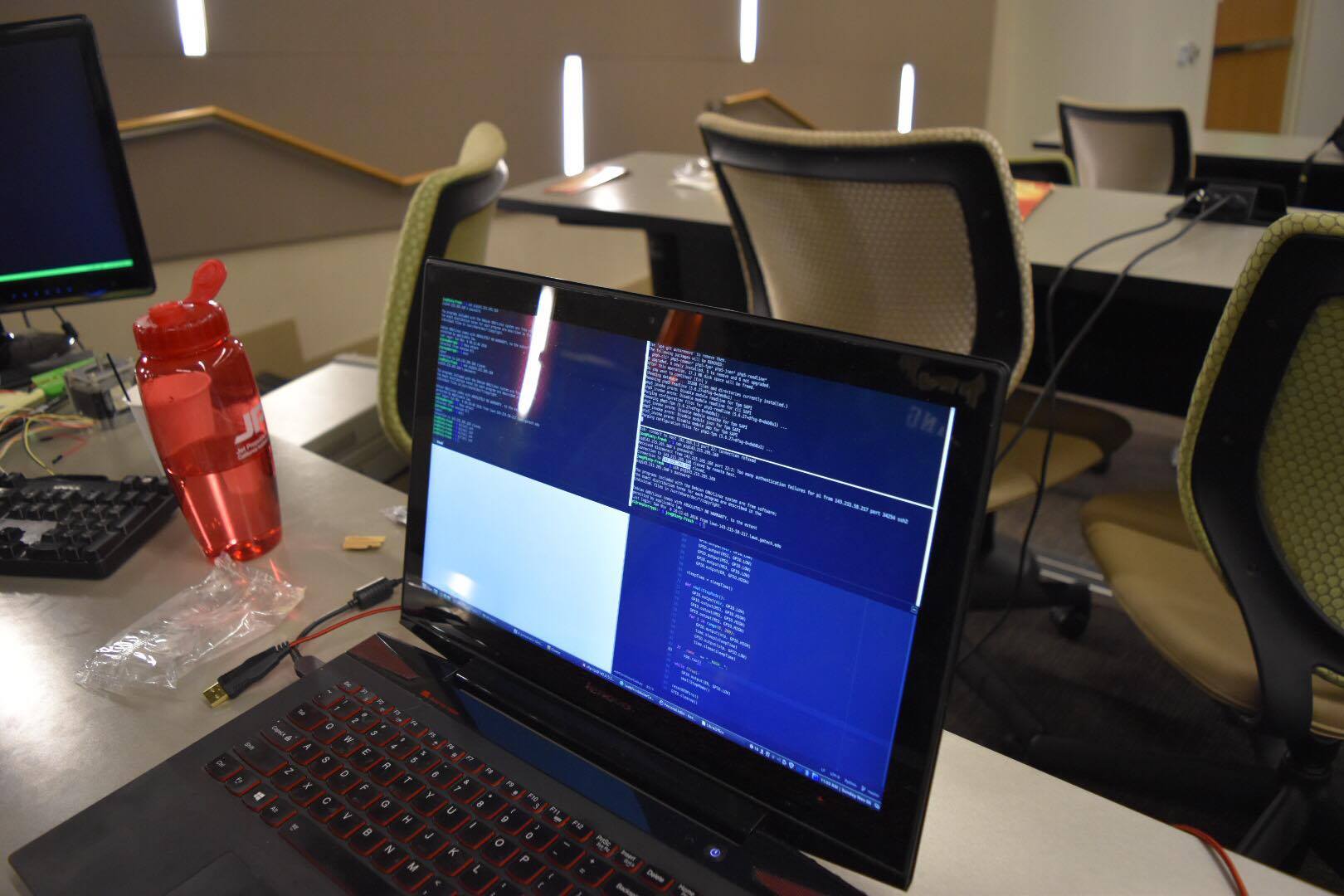
This is some of the backend communication with the raspberry pi.
-
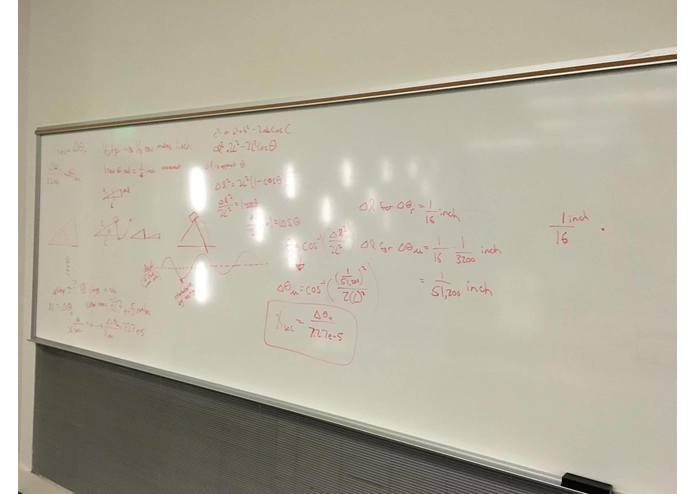
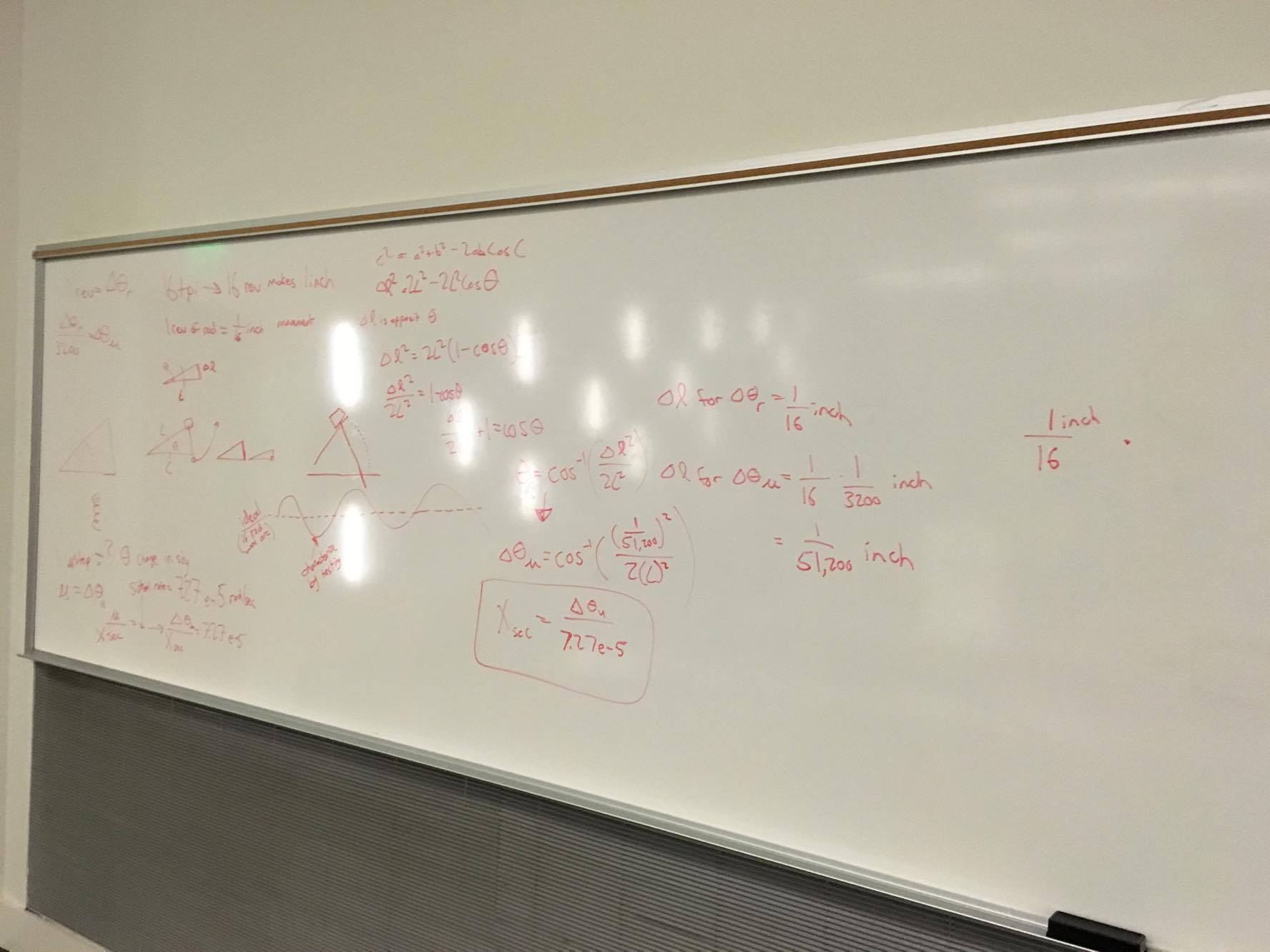
Here is some of the math we needed to calculate for the barn door tracker to actually work with the sidereal day.
-
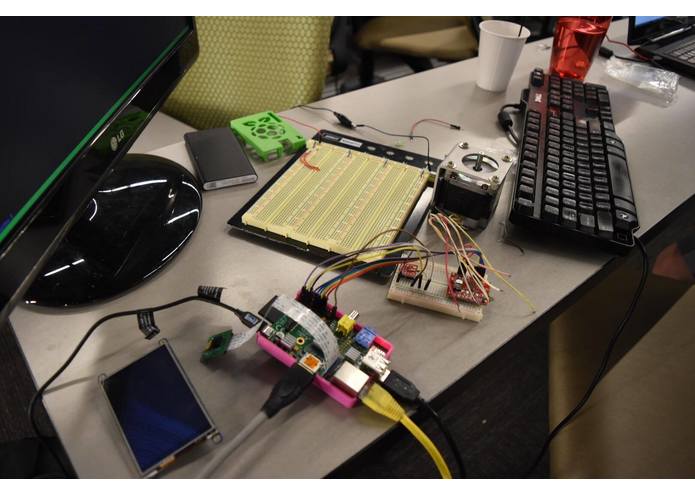
Our Raspberry Pi and Breadboard w/ connections. Hooked up is a gyroscope and a steppermotor.
-
Here is a sample of the code that runs the motor for the steppermotor. This code executes the math we drew out on the board.
-
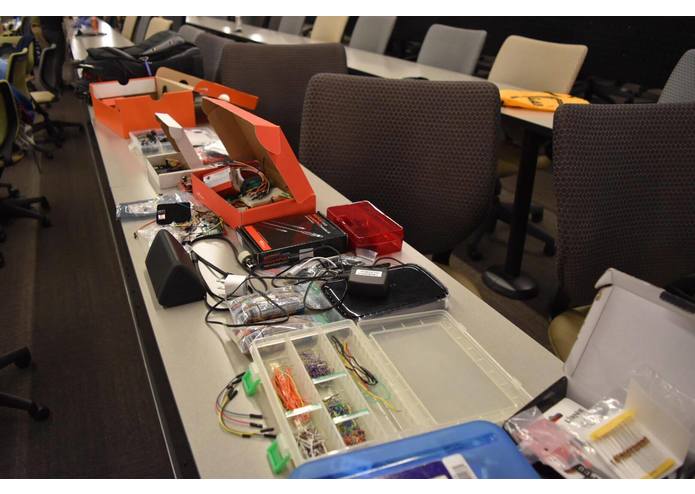
Here are our materials used.
-
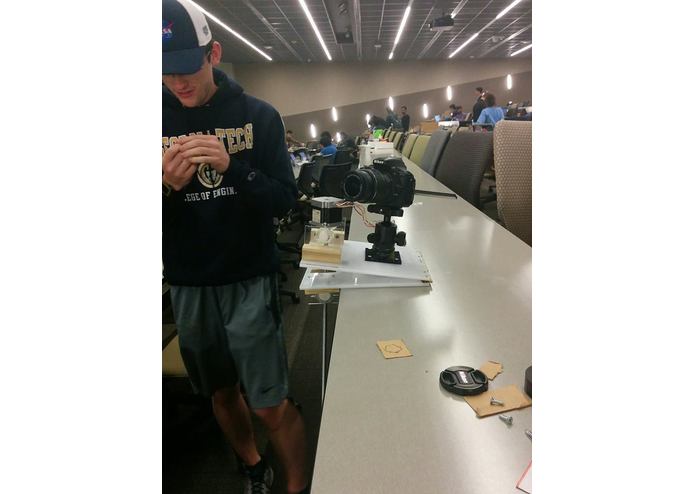
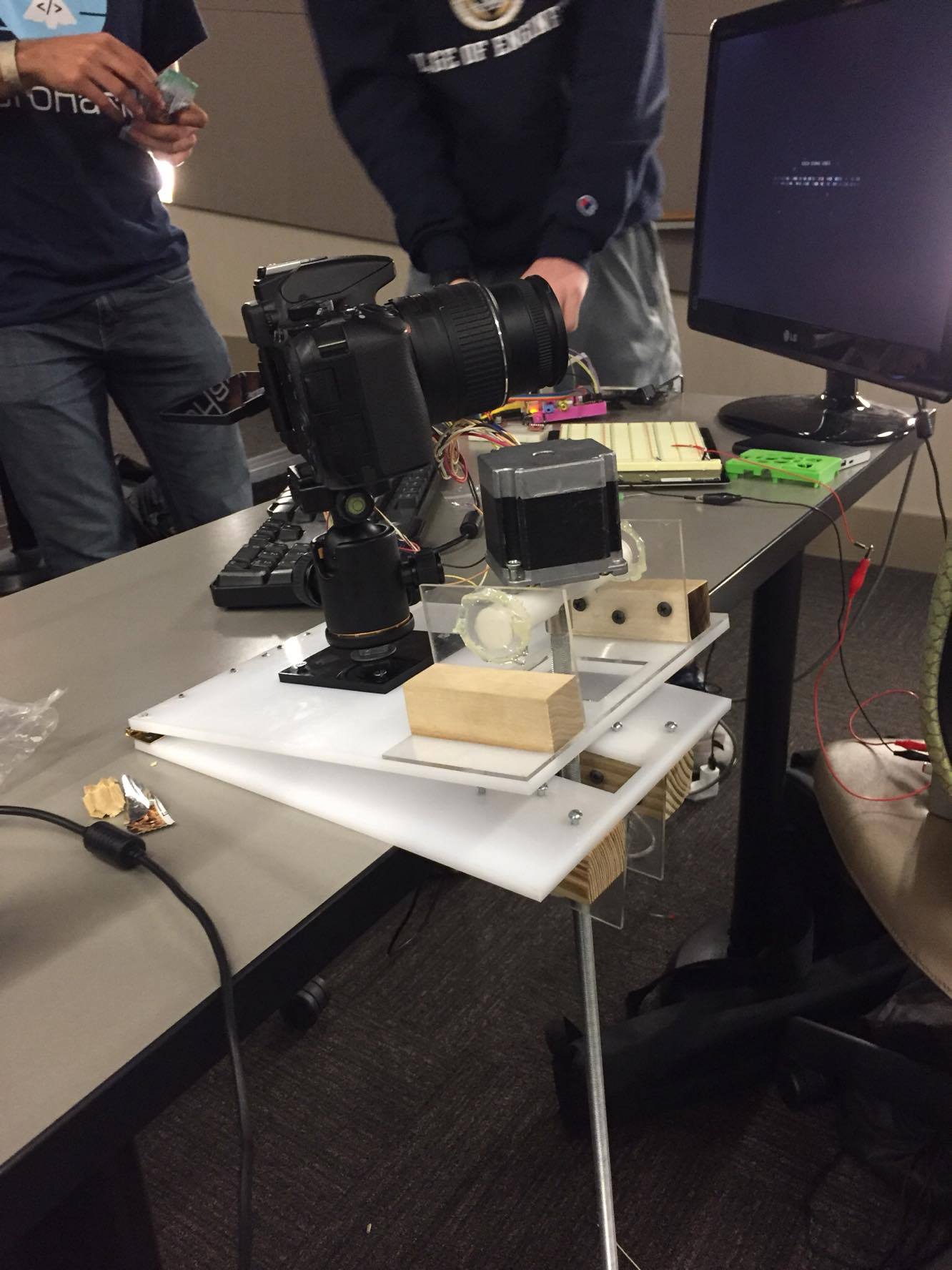
Here is our well-crafted mount.
-
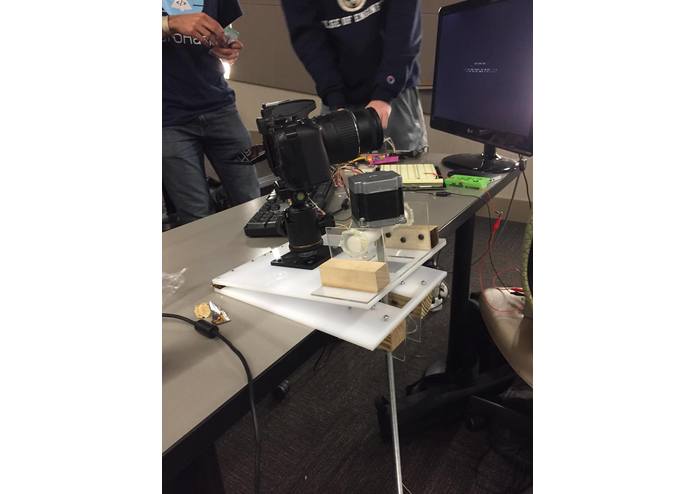
Here is the mount with all the hardware.




Inspiration
The inspiration behind our barndoor tracker was to find a cheap alternative for amazing astrophotography.
What it does
The barn door tracker moves with the stars on the night sky. This will keep a star or celestial object in the view of the camera/telescope as it moves.
How I built it
We split into two teams. The first team consisting of Jared and Tyler handled the hardware side. The two of them sketched out the designs, designed the mount in CAD, and spent the majority of their time at the studio cutting, drilling, and putting the mount together. The second team, consisting of Peter and Jon, focused on the software side. We first worked out the code to run the motor at the correct rate with the sky. The threaded rod we used was 28 TPI (Threads per inch), and so we used our known constants (board lengths, TPI, and Sidereal day). We also went back to our highschool days and used the law of cosigns to determine the angle of the mount, which was simple due to the mounts isosceles design. We also designed a gyroscope module to determine the pitch of the mount after it has been calibrated (set to x=0, y=0, z=0). We also added a very simple image tracker that locates the brightest object in an image and draws a rectangle around it. Finally, we integrated it all together and designed a simple webapp to display the data.
Challenges I ran into
This project was quite difficult. On the hardware side, we ran into numerous problems with cutting, screwing, and putting it together. At one point, the wood where the motor was drilled onto split, cause a lot of problems and a lot of time wasted fixing. The screws were also in such a position that, when needing to be screwed in after the threaded rod had been threaded completely through, couldn't be reached. On the software side, bugs were aplenty. Hooking up to the motor was difficult, and converting the arduino code to python took a bit of work. The rest of the modules gave us trouble and were fairly buggy, but we worked through most bugs eventually.
Accomplishments that I'm proud of
I am very proud of how our mount turned out. We were pretty pressed for time up until the last few minutes but what we made was nothing short of impressive given the time constraints. I am also proud of how well we learned how to deal with the raspberry pi, and by the end of the hackathon we could smoothly program essentiallly anything onto the pi.
What I learned
I learned that staying up all night is not great for my ability to program. All jokes aside, I've learned that with a lot of determination and teamwork, any team can accomplish what they set out to do. I've also learned a lot about hardware, mostly the raspberry pi. I've learned how to use Linux properly. The hardware team also had to adapt to many different challenges they were presented with when they were building the mount. They inevitably learned a lot from their work as well.
What's next for Barn Door Tracker
What's next? If we have more time we can definitely improve on the accuracy and design of the tracker. Given the time constraints, we didn't have much wiggle room for what we could do. This resulted in a lot of problems and a lot of essential elements left out, such as a correction for the arc of the mount. We will definitely work on the modules more thoroughly and really work out a quality mount for the low cost. And we wouldn't be as under pressure as we are right now. Still though, this has been a really fun project! We all really enjoyed ourselves.
Built With
- acrylic
- laser-cutting
- nginx
- python
- raspberry-pi
- wood


Log in or sign up for Devpost to join the conversation.