-
-
-

One of the drink selections
-
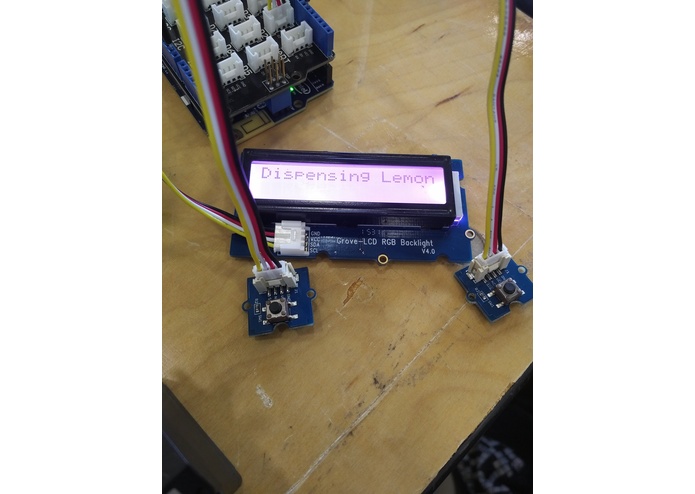
As the drink is being dispensed
-
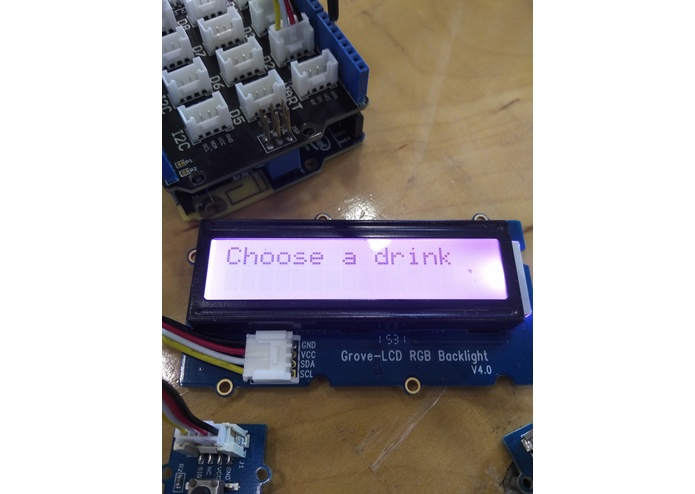
Start screen
-
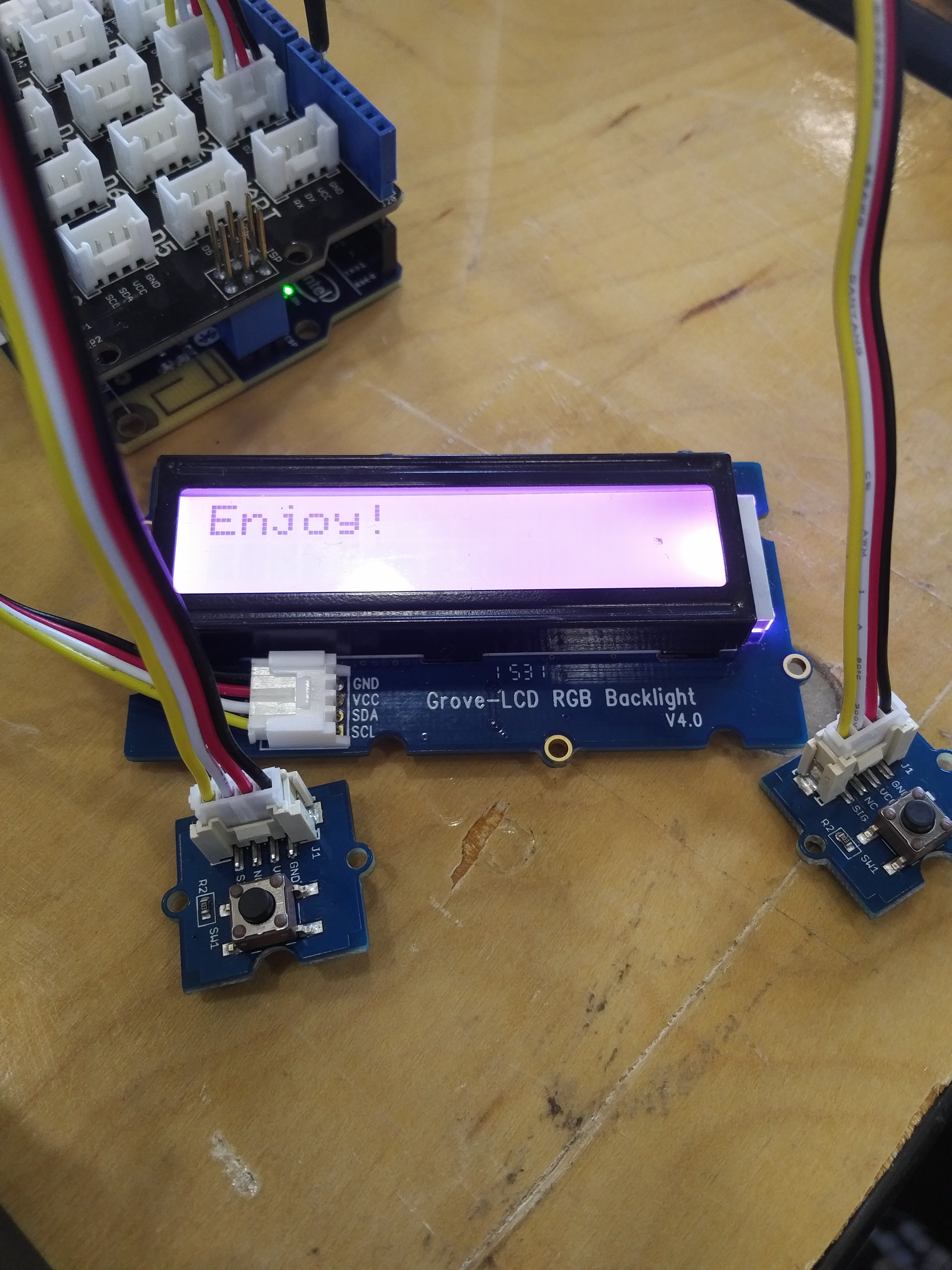
After the drink has been dispensed and return to the home position
-
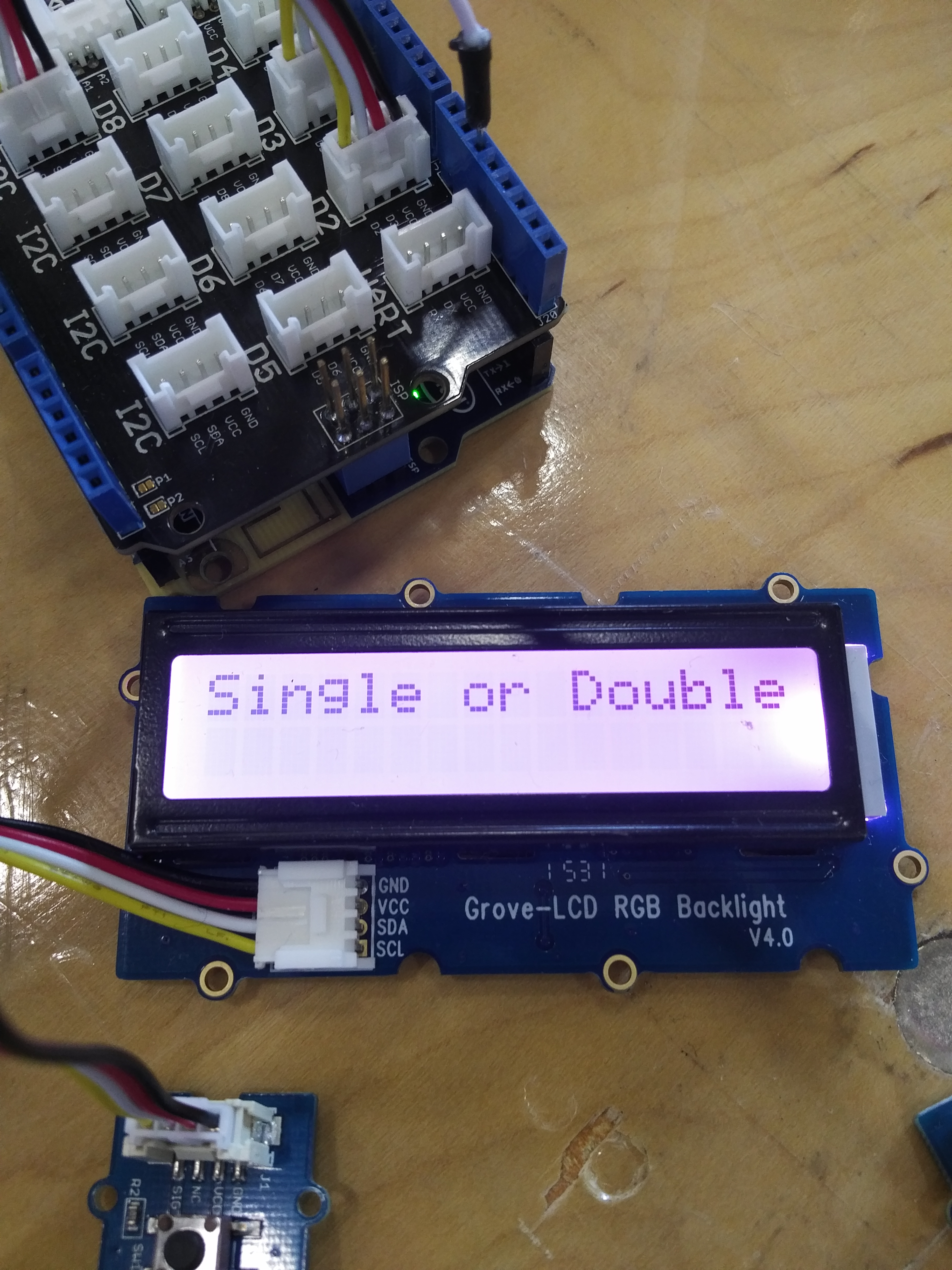
After selecting a drink
-
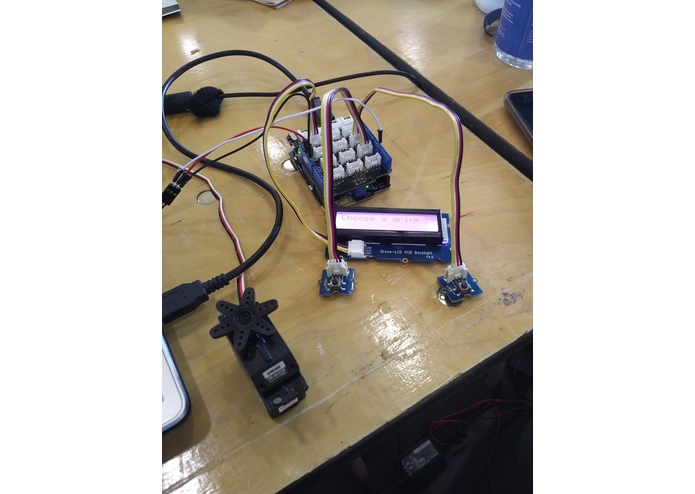
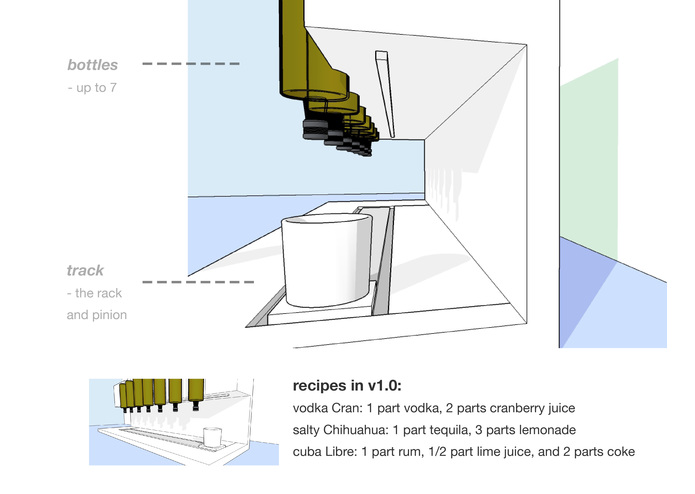
Full demo set up
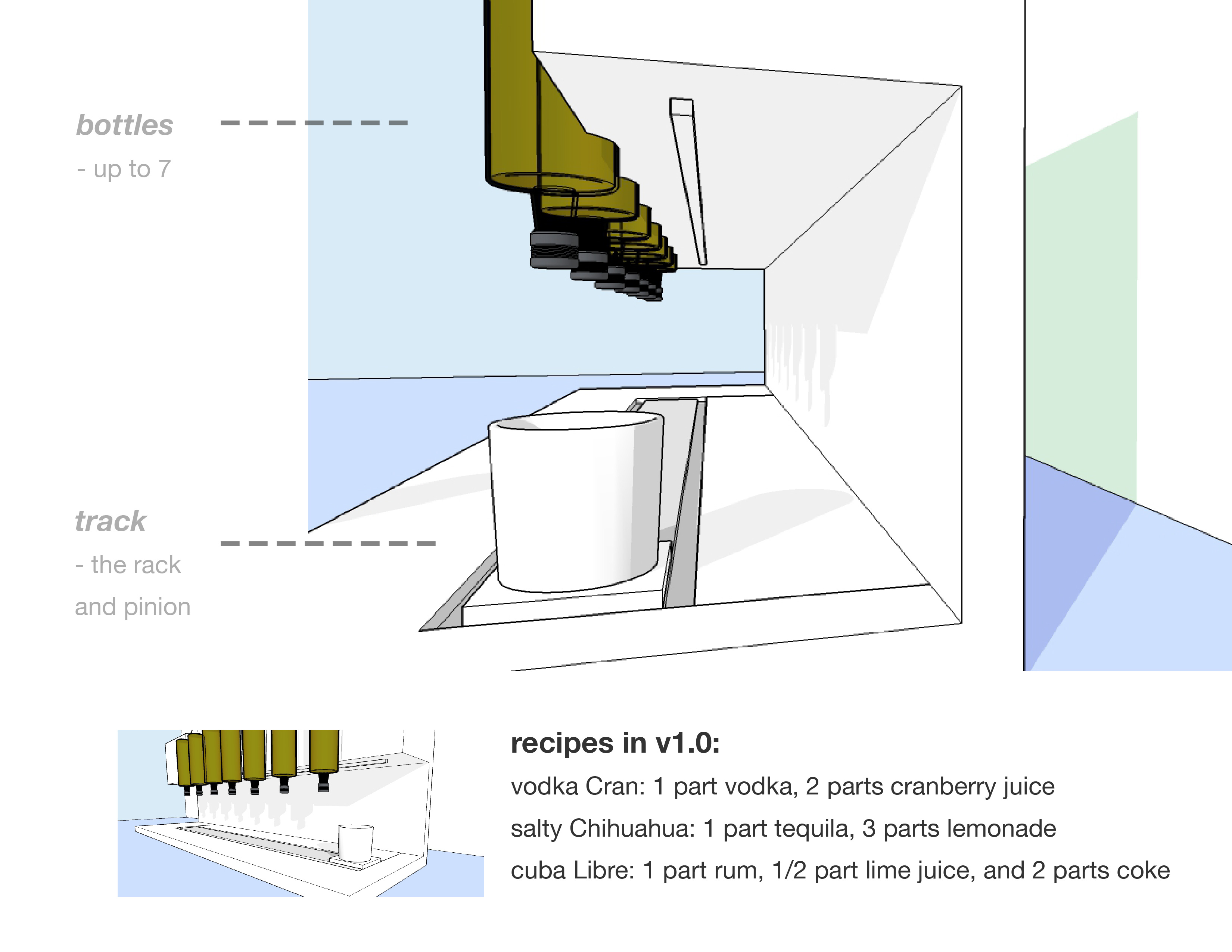




Inspiration
The focus on accessibility for those with impaired movements (eg, essential tremor, physical limitations, arthritis, etc.) is generally on essential, practical aspects of life. There are many solutions to the everyday problems faced by various groups of people, but not many when it comes to entertainment. Quality of life could be improved by looking at a way to make a "fun" activity, or a social activity, accessible for those who otherwise would not be able to partake. We chose to look at entertaining in one's home; and food and drink are a staple of that.
What it does
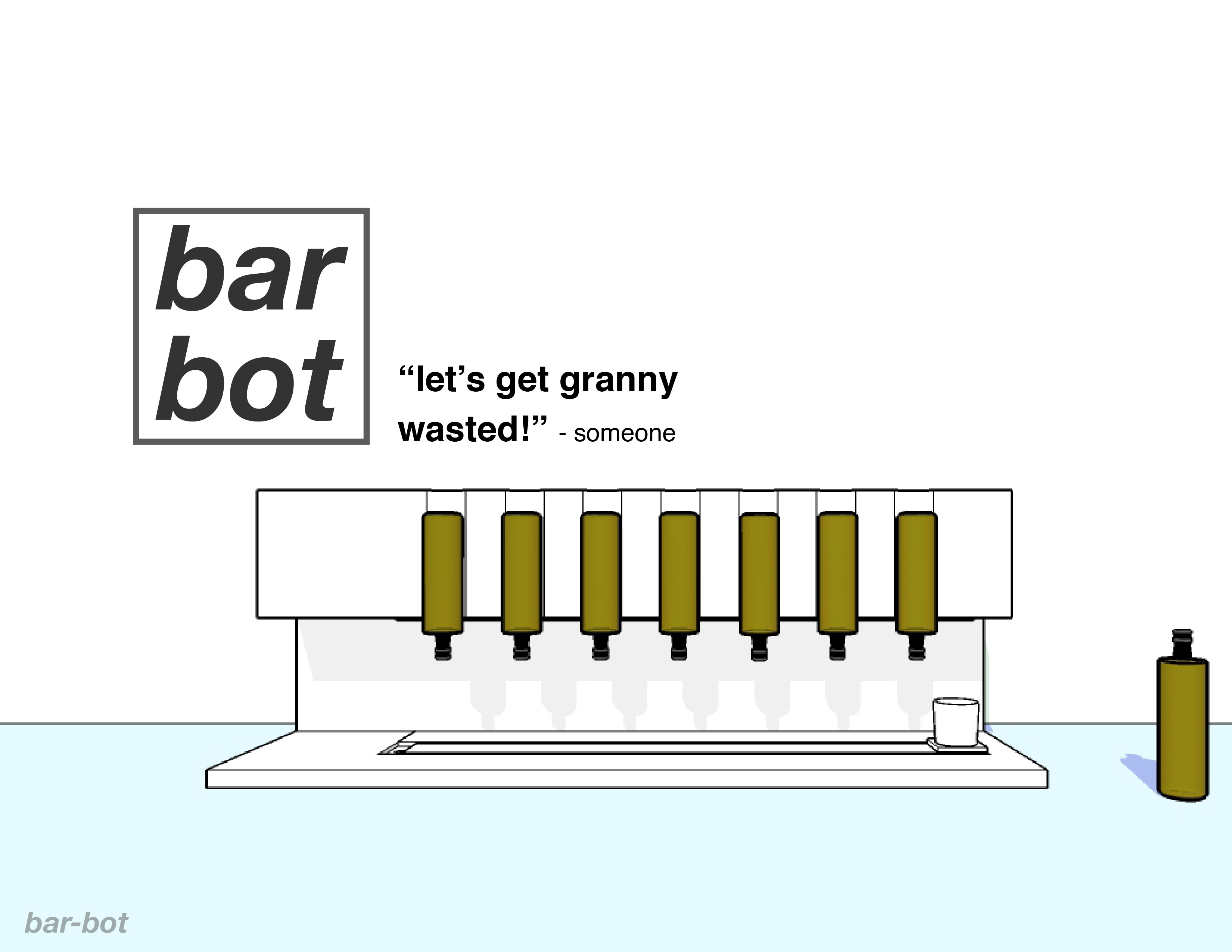
bar bot is an automated bartender. The user places a glass on the bar bot's tray, selects which drink they would like and if they would like a "single" or "double" (an extra shot). The bar bot then moves along the track, and by using 25 (and a 15) mL bar optics, dispense the appropriate amount of each liquid every time. Once completed, the tray will return to the home position, and waits some time before the user can request another drink - to prevent a drink being requested before the user places an empty glass on the tray.
How we built it
We used an Arduino 101, a servo, a backlit LCD, and two buttons to create the controller system for the bar bot.
Challenges we ran into
The Arduino IDE has changed in the 4 years since we touched an Arduino microcontoller; it was a fast learning curve, but it took time to remember how to code using Wiring. Not all the hardware needed to fully implement the sensing/actuation/controlling system were available at the hackathon, so the demo we have now is a proof of concept.
Accomplishments that we're proud of
Having the LCD display the proper cases, and allowing the selection of options! This took us the longest time to code.
What we learned
In the last few lines of code, we realized that most of the movement of the tray we could have put into functions. There was a lot of repetition in the servo control, and would have vastly improved readability of the code, as well as cut down development time.
What's next for bar-bot
- Streamlining and cleaning the code we have now, so when the rest of the robot is added, the code is still readable.
- Structural design (frame, rack and pinion, drink tray); the addition of more drinks and mixers; and the implementation of the sensors and actuators unavailable at this hackathon - specifically: proximity sensors to tell position on the track, multiple servos, and larger buttons (for ease of use).
- The implementation of more drink options; including a "Custom" option, where the user can select which drinks and mixers they want.
- The implementation of a more interactive screen; potentially an app for a tablet, with the ability to view the menu and create, edit, and store custom drinks.
- The potential to use RFID tags or a mobile phone app for a user to order drinks; with the added functionality of "cutting off" a user if their alcohol consumption went over a predetermined amount.




Log in or sign up for Devpost to join the conversation.