-
-

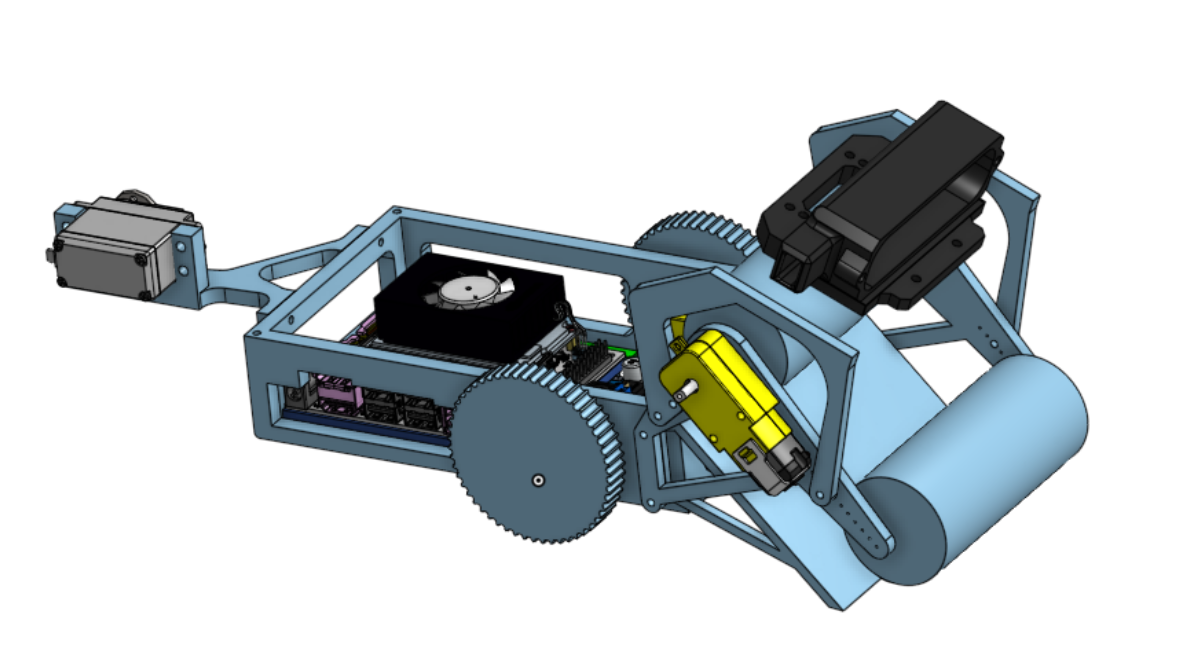
CAD design
-

BALL-E

Inspiration
Within the competition robotics team, TAMU Robomasters, there is extensive testing that is done with projectile firing. This leaves an abundance of small projectiles on the floor. We aimed to build a robot that autonomously pickup the ball projectiles.
What it does
BALLE is a robot that autonomously picks up balls using computer vision, and stores it.
How we built it
A 3d model was built first that contained all of the devices, motors, and electronics, that acted as the main body. Next the intake needed to be modeled, which is based on a conveyor belt. Once the design was finalized, we used 3d printing to make it real. For the software we configured the GPIO pins to PWM in order to control the power and speed of the wheels. We then used a Python package to control the duty cycle and the direction of the wheels. To integrate the data from our camera's AI model and with our motor drivers, we used ROS2 to run all the processes concurrently
Challenges we ran into
On the hardware side, the intake conveyer system was a challenge to engineer. Several ideas were discussed including a windmill-like cardboard spinner and even a vacuum system, however the best overall design was the cardboard conveyer. It allowed for a less-aggressive slope to be used which overall reduced the backpressure when collecting balls.
Accomplishments that we're proud of
A big moment for us was when we got the robot to move for the first time.
What we learned
Learning and using Robot Operating System(ROS2) was a huge accomplishment for us, as it's a commonly used framework in the robotics industry and helped run our different subsystems in parallel.
What's next for BALLE
Improving the in take mechanism and path finding algorithm
Built With
- 3dprinting
- cad
- jetson
- opencv
- python
- realsense
- ros
- yolo


Log in or sign up for Devpost to join the conversation.