Inspiration
We want to learn more about PID control by using the Arduino System.
What it does
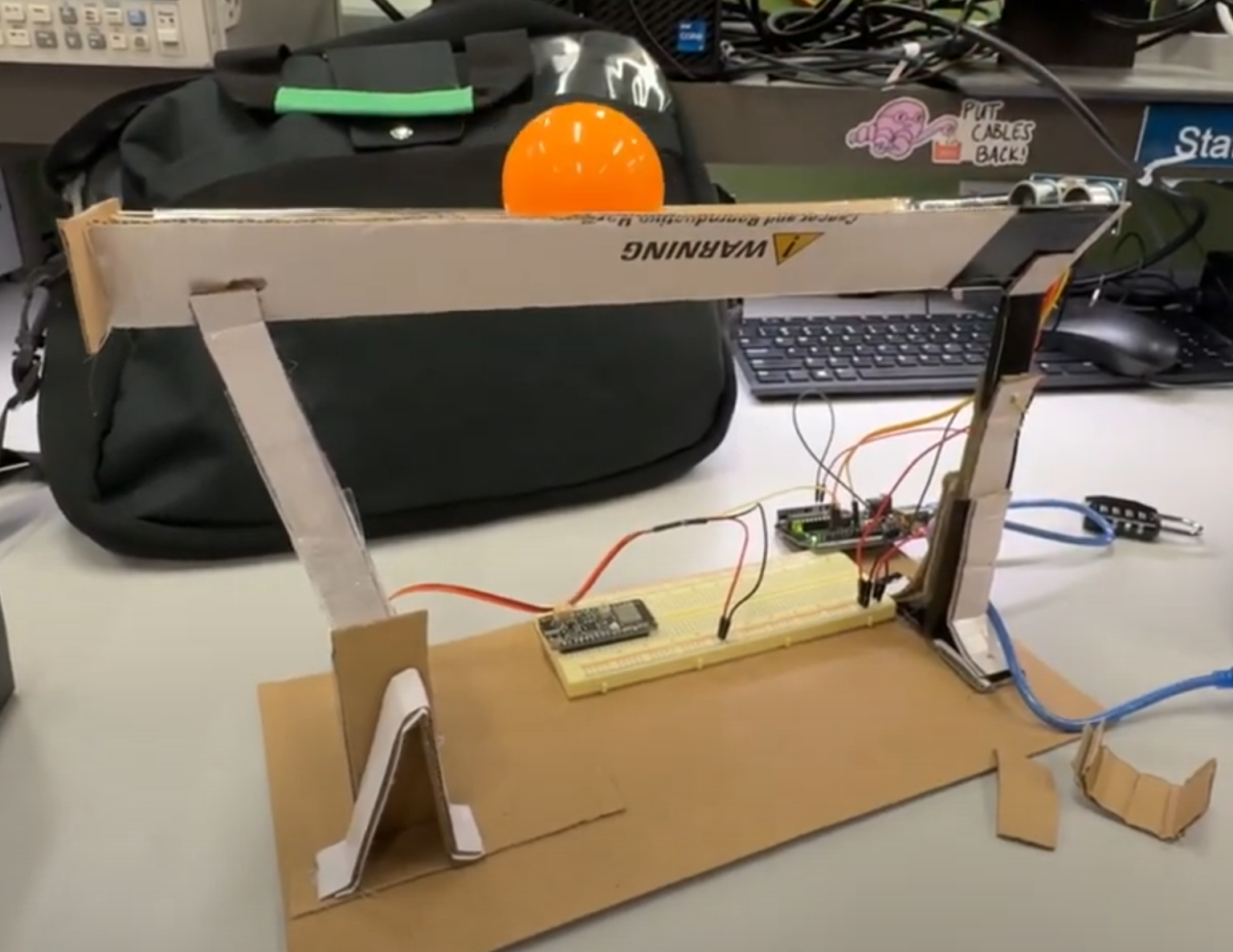
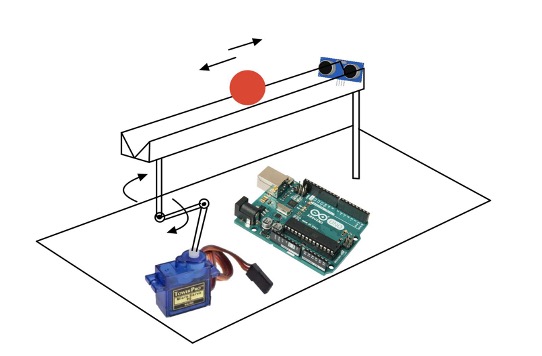
Develop a stability control system using a PID controller. Aim to stabilize a ball at the center of a platform, countering any destabilizing forces.
How we built it
- Methodology: a. Construct a platform equipped with an ultrasonic sensor and motor.
b. Using the ultrasonic sensor to measure the distance of the ball.
c. Calibrate the PID controller—tuning the proportional (P), integral (I), and derivative (D) values for the specific setup.
d. Implement the PID algorithm and develop the software to manage the system.
e. Using BLYNK and ESP32 to setup a wifi PID Value control.
- Integration: a. Combine the hardware and software components, followed by testing the prototype.
Challenges we ran into
The most challenging issue we have to face is tuning the PID Values and it is really hard to find a perfect value to make the system respond in a fast and stable way.
Accomplishments that we're proud of
We made the ball stable! Yeah
What we learned
We have learned the basics of the control system and learned how PID algorithms work in such control system.
What's next for Ball Stability Control using PID Controller
Due to time restrictions. We will try to add more functions like LCD Screen display PID Values to this project in the future.

Log in or sign up for Devpost to join the conversation.