-
-
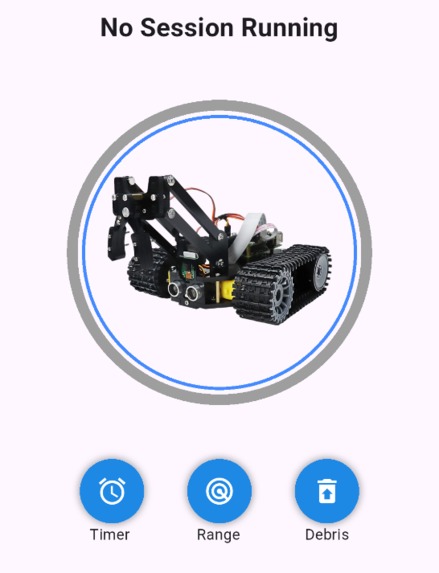
Home Page
-
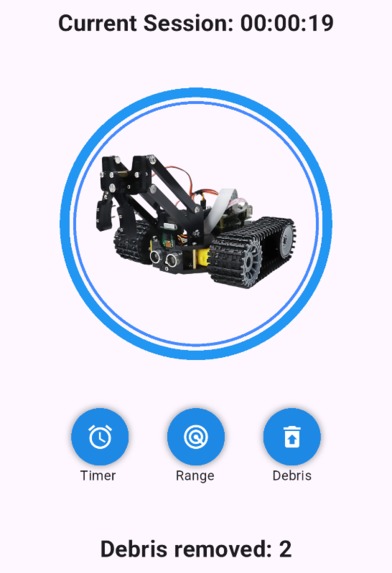
Activation of Baldur
-
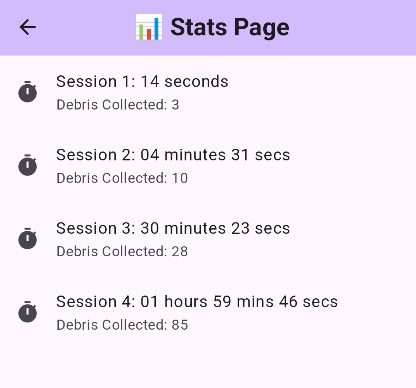
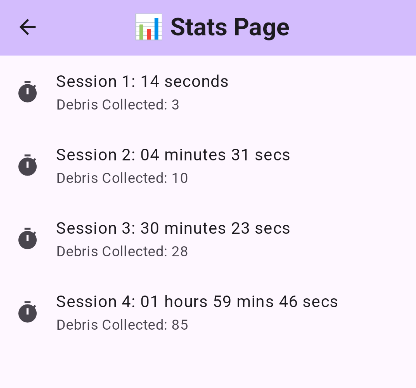
Stats Page
Inspiration
During crop harvesting, debris such as rocks, branches, and metal objects can cause severe damage to farming equipment, leading to costly repairs and delays. Unfortunately, with limited time and human resources, manually detecting and removing these obstacles is not always feasible. This project aims to provide an autonomous, AI-powered solution to detect and remove debris from fields using a Raspberry Pi-controlled vehicle equipped with a robotic claw.
What it does
The user navigates through a beginner-friendly, accessible app that provides real-time monitoring and control of the vehicle. Once activated, the vehicle utilizes sensors and cameras to detect objects in the field. When it detects a potential object, it uses a robotic claw mechanism to securely grasp objects of different shapes and sizes. The debris is then relocated to a designated disposal or storage area, where the vehicle drops it off to continue searching for debris.
How we built it
Anupam and Kaito: Utilized the provided Freenova robot kit to build the robot, OpenCV and NumPy to facilitate data processing (for identification of debris), and Python3 to run the computer vision algorithms and flask server.
Hanel and Nathan: Utilize Android Studio and Flutter/Dart to design the app and its functionalities connected to Baldur; used VS Code with Python/Flask to establish communication between our Flutter/Dart front-end and the Python back-end via GET and POST commands.
Challenges we ran into
Anupam and Kaito: Setting up the Raspberry Pi with the Claw kit, making Baldur properly stop to grab onto the debris, turning 90 degrees consistently, utilizing the ultrasonic sensor to grab and drop the debris, keeping Baldur in one piece and not having it fall off the table or burn itself
Nathan and Hanel: Aligning and giving proper spacing to front-end elements for the app, setting up Flutter Routes and saving values between pages, setting up the stopwatch
The entire team: Having issues in connecting with Raspberry Pi via Ethernet
Accomplishments that we're proud of
Kaito and Anupam: Creating the mechanisms for operating the robot and perfecting the computer vision algorithms to identify which debris to pick up correctly. Lastly, integrating the front end with the backend flask server to make the app functional.
Hanel and Nathan: Made an intuitive UI for the app with responsive components and a welcoming design, finished multiple functionalities that are useful and informative to the user in a limited time, proficiently merged our changes via git commands
What we learned
Anupam and Kaito: How to use OpenCV and NumPy for data processing, operate hardware components through Python3, and resolve IP addressing issues when setting up the Raspberry Pi
Nathan and Hanel: Programming with Flutter and Dart, backend + frontend connection with Flask + Flutter (GET and POST commands)
What's next for Baldur
- Adding a gyroscope for accurate navigation
- Adding new functionalities for information, data collecting, and adaptive settings on the app



Log in or sign up for Devpost to join the conversation.