-
-
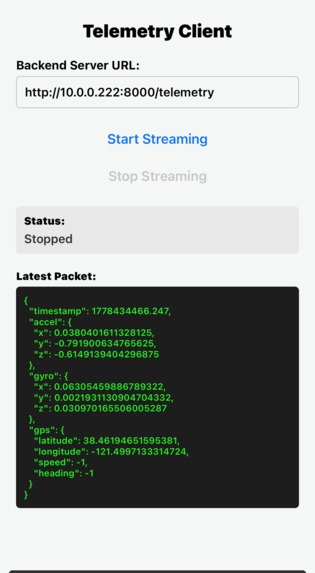
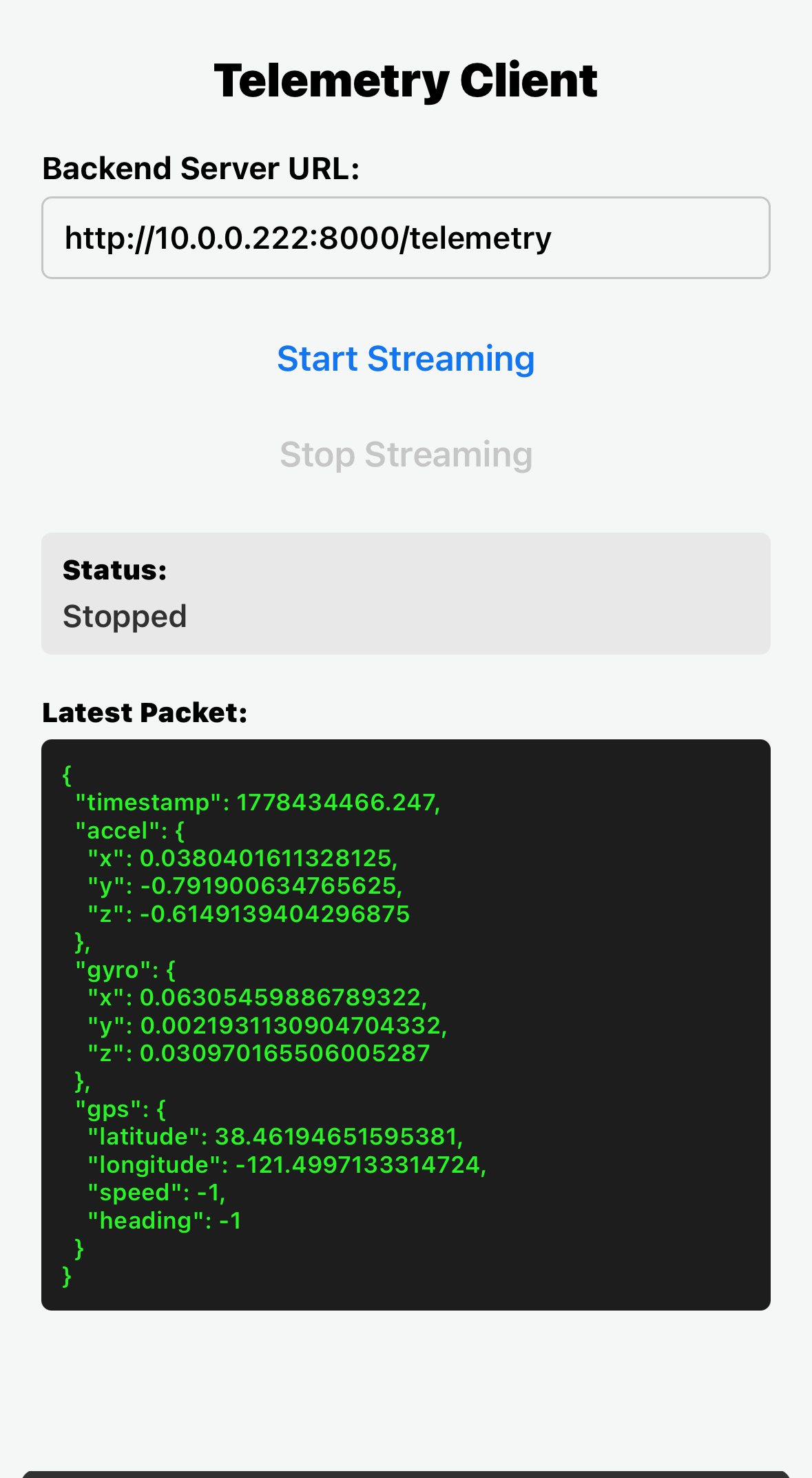
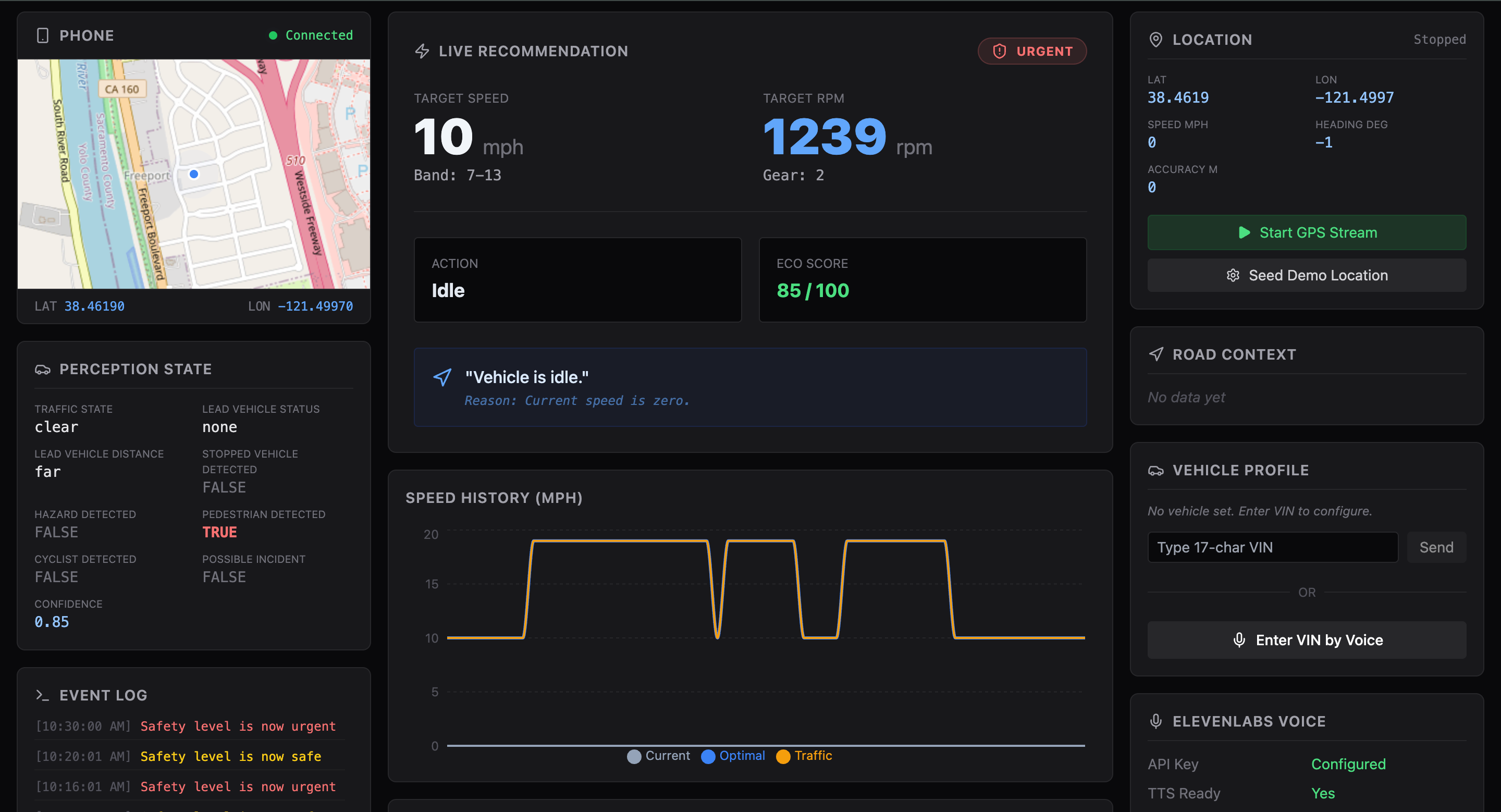
Getting real time data as we drove the car
-
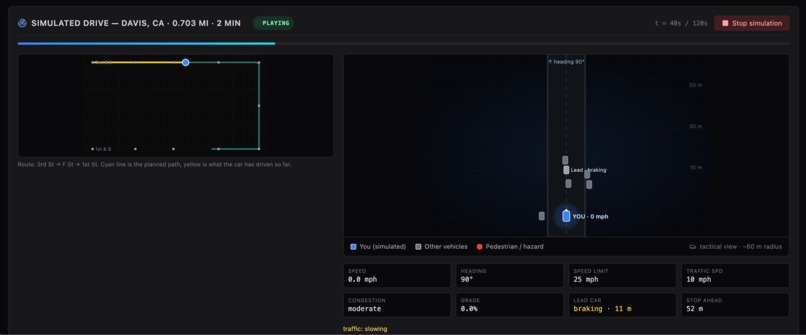
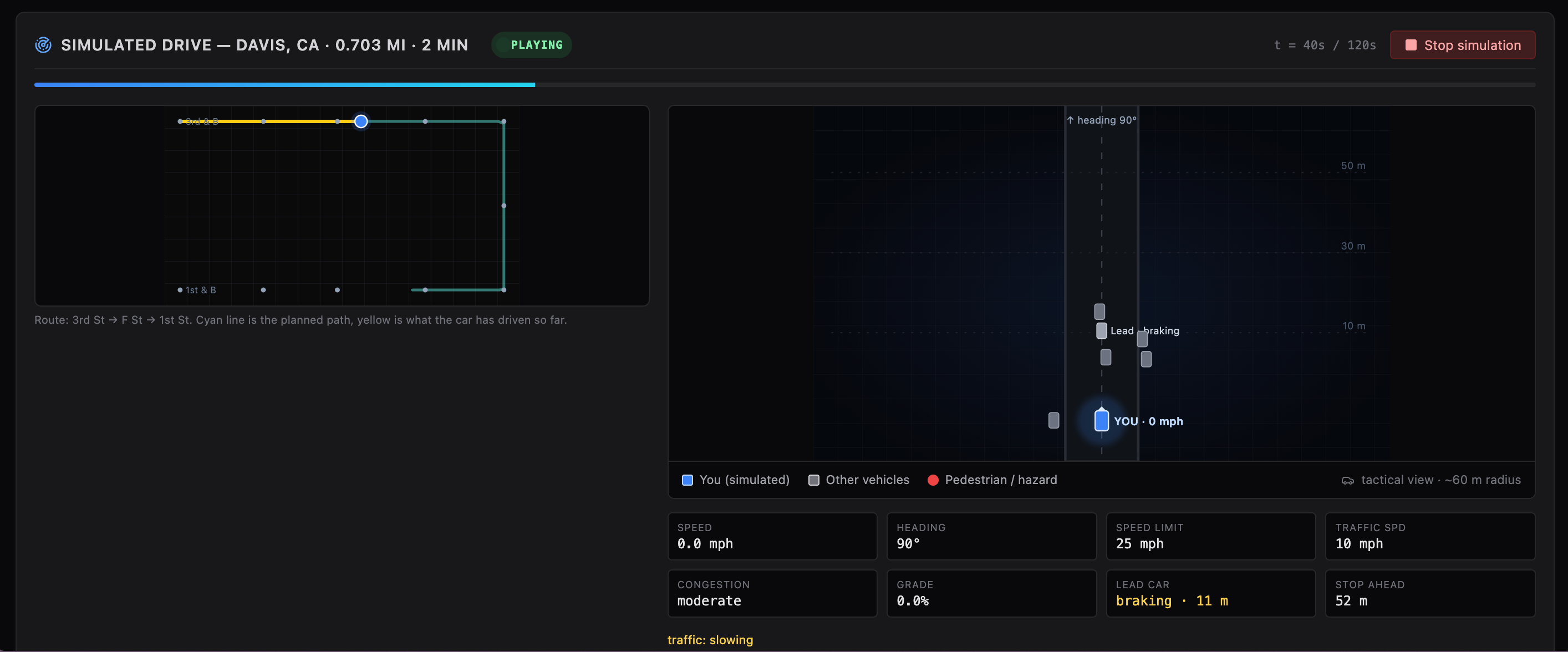
Results of our simulation software
-

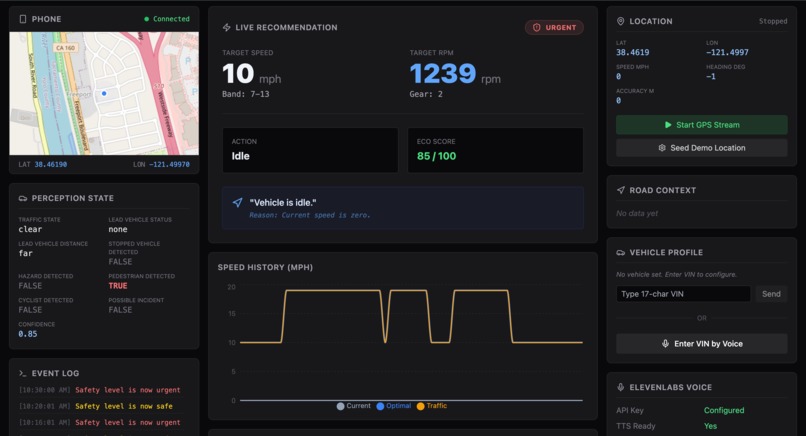
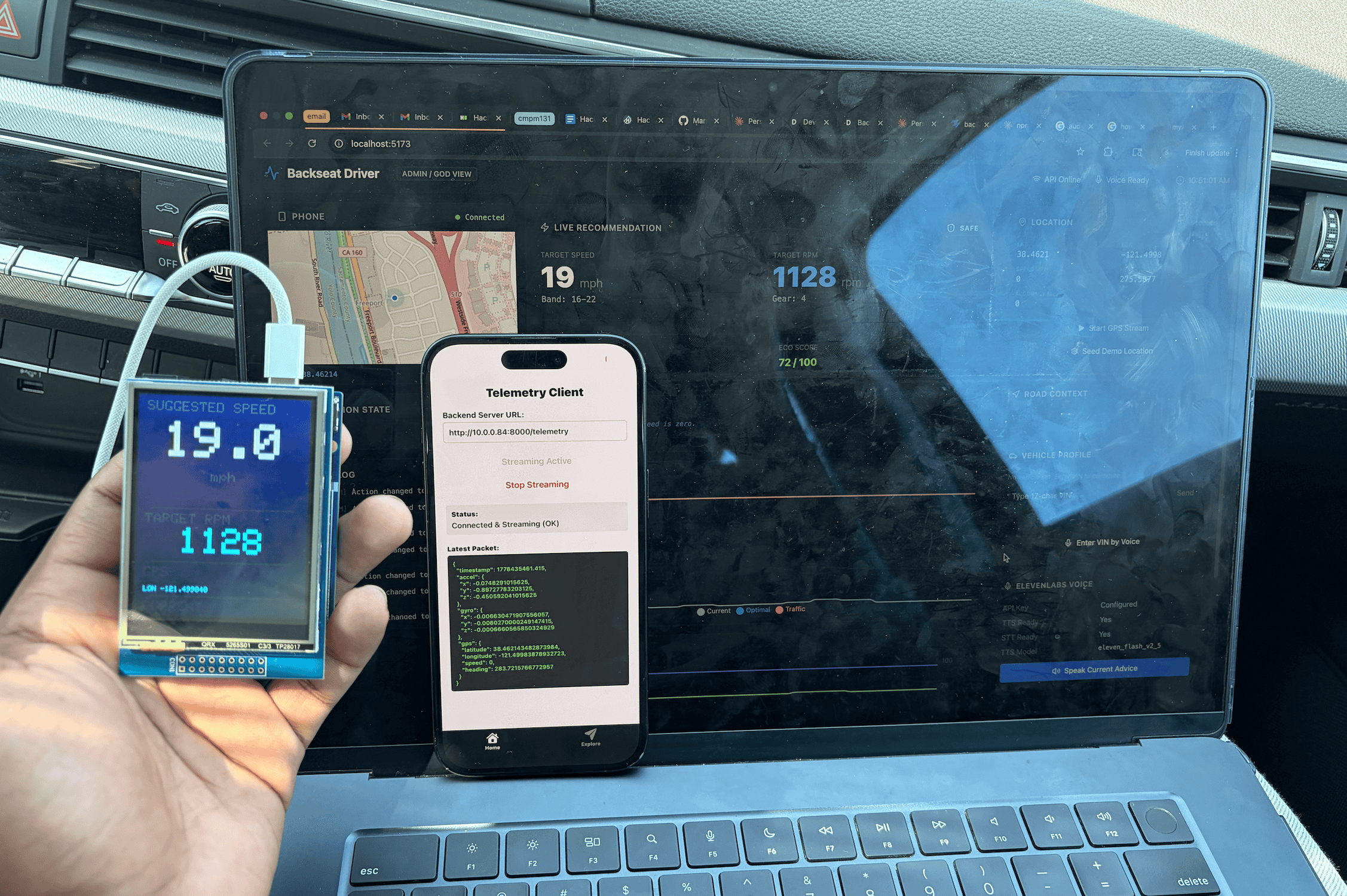
Picture of all constraints while driving
Inspiration
Fuel waste is one of the most overlooked problems in everyday driving. Most of it comes from simple habits like accelerating into a red light, braking hard, then accelerating again. We wanted to build something that sits in your car and coaches you in real time, cutting fuel waste without changing your routine.
What it does
Backseat Driver uses a dashcam to detect traffic ahead using computer vision and displays a live fuel-saving recommendation on an Arduino screen mounted in your car, telling you exactly when to speed up, cruise, or slow down. No app to open, no buttons to press. Just drive and let it guide you.
How we built it
We tackled two core problems.
1. Perception — using YOLOv8 to detect and track vehicles in real time from dashcam footage, classifying traffic state and lead vehicle behavior frame by frame.
2. Decision making — combining that traffic data with current speed, road grade, and GPS context into a single fuel-efficient speed recommendation pushed live to the in-car display.
Challenges
Our biggest challenge was hardware. Originally the idea required physical sensors to measure variables like speed and road grade. We didn't have access to those, so we had to rethink our approach and figure out how to derive the same information mathematically from camera data alone. Making sure the camera was accurately detecting the right variables was its own challenge, and finding creative ways to infer what we couldn't directly measure pushed us to think differently about the whole problem.
Accomplishments that we're proud of
We built a fully functional real-time computer vision pipeline that detects and tracks vehicles from live dashcam footage and turns that raw visual data into actionable driving advice. What we're most proud of is figuring out how to replace hardware sensors entirely with camera-derived data. That pivot could have killed the project but instead made it leaner and more practical. Getting everything to work together in real time, from camera input to display output, in under 24 hours is something we're genuinely proud of.
What we learned
We learned a lot about what it takes to go from an idea to a working system under real time pressure. Building two complex components independently and connecting them cleanly taught us how important clear communication and agreed upon data contracts are between teammates. We got hands on experience with real time computer vision, object tracking, and optimization modeling. We also learned that constraints, whether hardware, time, or resources, often lead to more creative solutions than having everything you need from the start. Most importantly we learned that a well scoped problem with a focused solution is more impressive than an ambitious idea that never comes together.
What's next for Backseat Driver
The next step is integrating real OBD-II sensor data for actual RPM and engine load readings, which would make our recommendations even more precise. We also want to expand the display interface, improve the voice guidance system, and test across more driving conditions like highways, school zones, and stop and go city traffic. Long term, we see Backseat Driver as a plug and play device any driver can put in their car to immediately start driving more efficiently and saving money on fuel.
Built With
- anthropic-cloud-api
- arduino-uno
- c++
- c++-(arduino-sketch)
- custom-centroid-tracker
- custom-centroid-tracker-languages:-python-3
- elegoo-lcd-module
- eleven-labs-api
- elevenlabs-api-(text-to-speech)
- fastapi
- ios
- iphone-(gps-+-imu-sensor-source)-computer-vision:-yolov8n-(ultralytics)
- javascript
- javascript-(browser-dashboard)-backend-&-networking:-fastapi
- ncnn-runtime
- open-cv
- opencv
- python
- python-http.server-for-mjpeg-streaming
- pytorch
- pytorch-(cpu-only
- raspberry-pi
- raspberry-pi-4b
- sensorlog
- udp
- udp-for-iphone-sensor-stream
- usb-serial-for-pi-to-arduino-ai-/-ml:-anthropic-claude-api-(decision-layer)
- usb-webcam
- yolov8n


Log in or sign up for Devpost to join the conversation.