Inspiration
Both of us love to build stuff
What it does
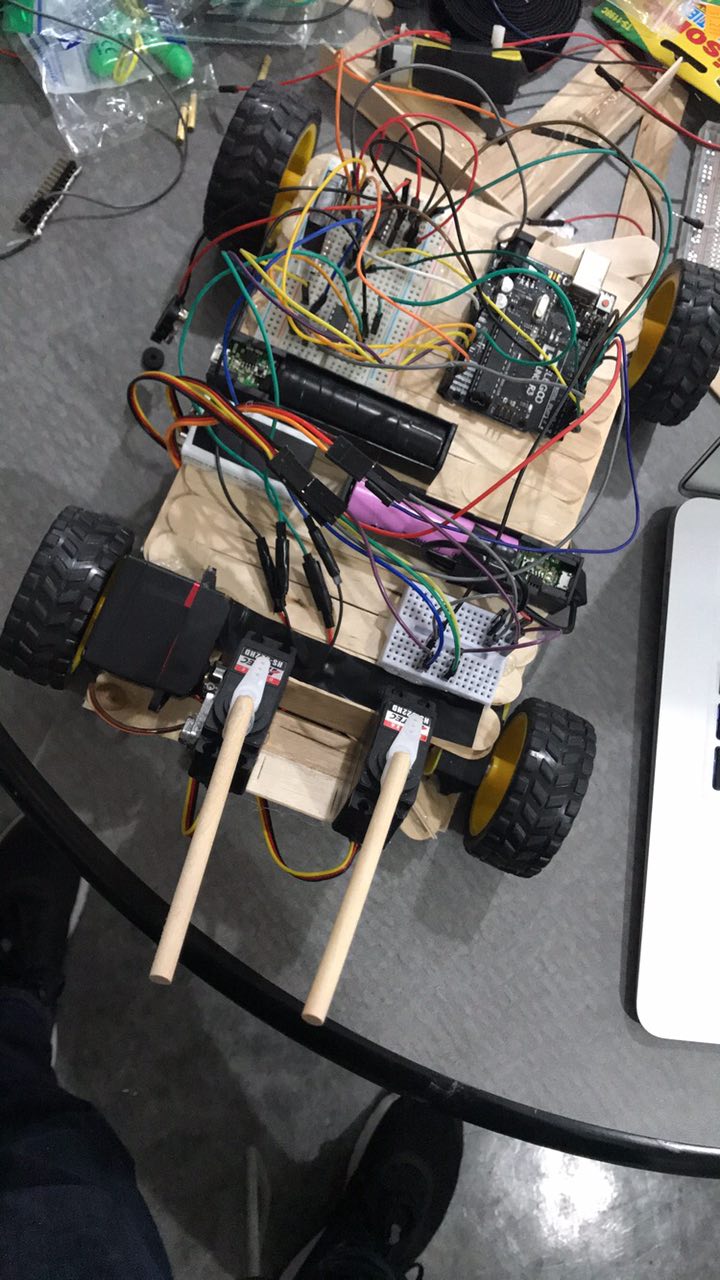
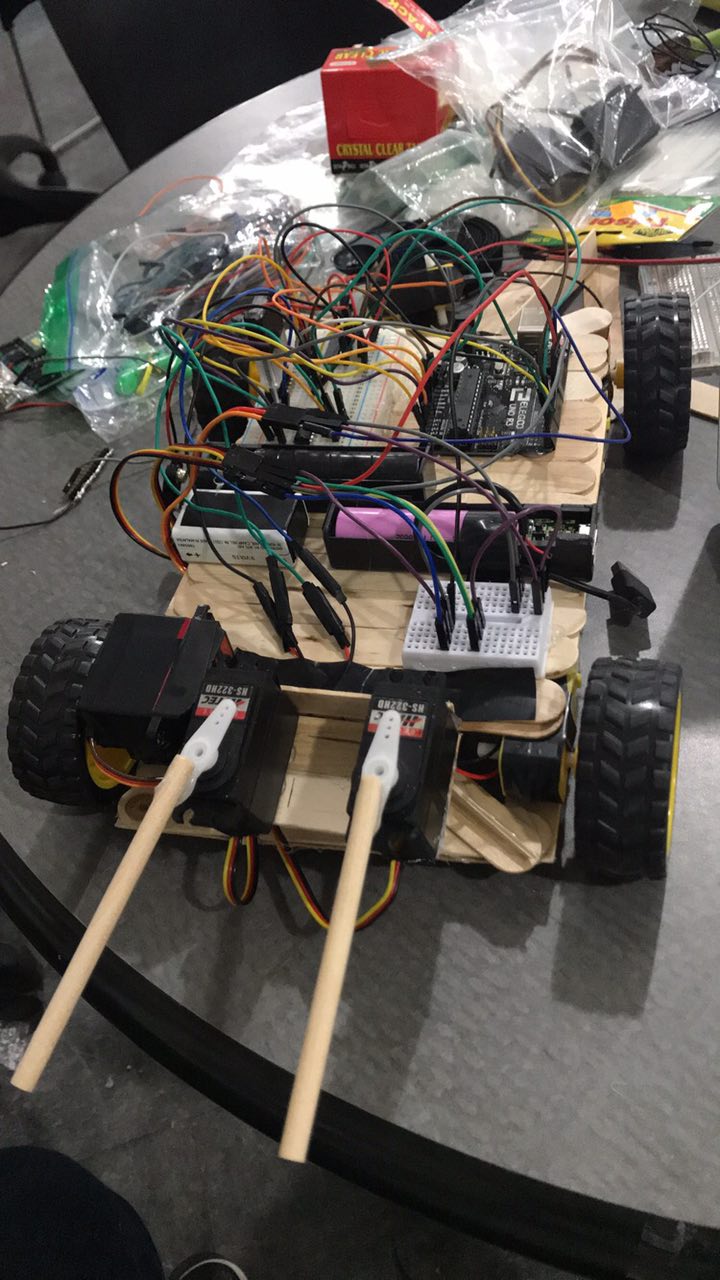
B.A.M. is a robotic car that can pick small items up using bluetooth sensors attached the the driver's arm, in which a joy stick controls where the robot moves, and the sensors on the hand controls the movement of the arm.
How we built it
We used Arduino and other sensors to incorporate motion sensors drive train. The car it self uses 4 motors, 2 hbridges to control the 4 wheels. 4 battery packs for different parts of the car. The arm is controlled by servos.
The part that goes on your hand uses flex sensors and bluetooth module and communicates with the car
Challenges we ran into
Forgetting to plug in a wire and going through 100 wires to see why its not working. multiple times.
Accomplishments that we're proud of
It drives wirelessly, is able to pick things up, and we accomplished our goal that we set out to do.
What we learned
Being my first hackathon, i was able to learn a lot about Arduino and its coding process from Bahti. I was also able to learn the uses of different types of sensors, and learned a new way to maintain structural stability in the chassis when using such weak material.
What's next for B.A.M
We hope to develop more ways to use the flex sensors on other parts of the body besides the hand for.
Also more siblings for BA.
Built With
- arduino
- flex-sensors
- h-bridge
- hc-05-bt
- joysticks
- motors
- servos




Log in or sign up for Devpost to join the conversation.