-
-
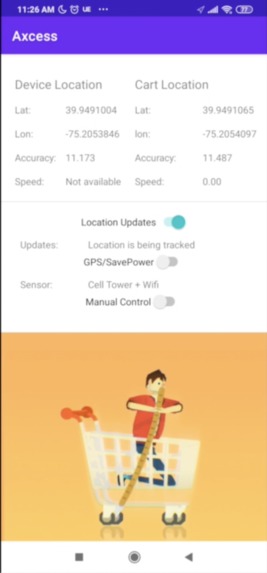
App Connected to GPS
-
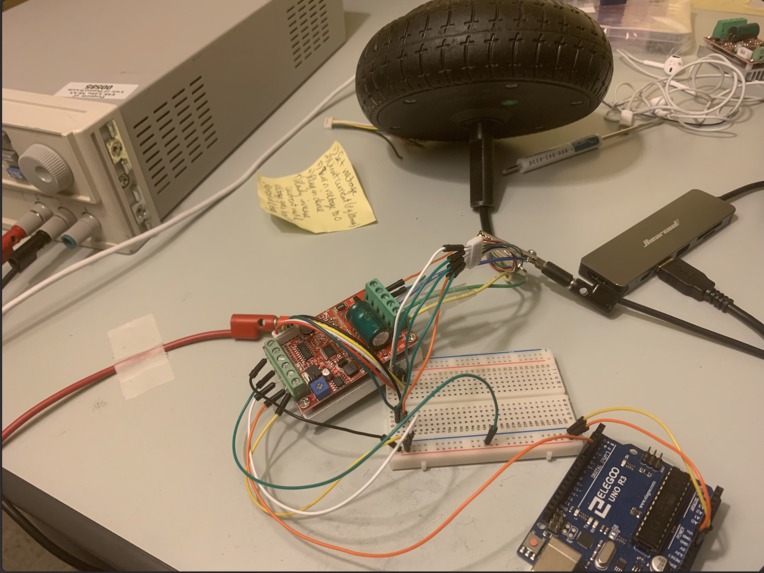
Motor Control Circuit


Inspiration
Our aim is to make the food gathering process easier for food banks and their volunteers through the use of delivery robots. We want to build a robot that can be deployed to restaurants and grocery stores, pick up excess food and return to the food bank with the delivery. We’ve drawn inspiration from the food delivery robots that have begun to pop up on college campuses used to bring food from a restaurant to a consumer.
What it does
Our final project is a robot capable of navigating and transporting loads between multiple destinations within a city. It will be equipped with the necessary hardware to handle curbs, streets and roads and the necessary software to navigate itself efficiently and safely, deal with obstacles and perform successful pickups and deliveries.
Challenges we ran into
We realized that we should’ve allocated more time to account for unexpected surprises and difficulties, especially since our project was a relatively big undertaking. Initially, we had a simpler idea for our final project but actually ended up changing it a couple of days before the proposal deadline. As such, we had to scramble to figure out how we would build the robot and then source the required components. As it turned out, one thing after another went wrong. For one, we already had to wait a week for the hoverboard containing our motors and battery to arrive. However, this timeline was extended since the hoverboard arrived three days later than it should have, and this was two days before the final demo was due, so we lost quite a bit of time when it came to getting started on the hardware.
Additionally, we realized that we should’ve done more preparations before delving into building the circuit needed for our robot, especially since our components are very expensive to replace if damaged. We ran into a problem where we allowed our battery to discharge for too long while building and testing the circuit. This led to it being non rechargeable for good and seeing as it was a 24V LiPo battery, our budget couldn’t accommodate purchasing a new one. As a possible solution, we attempted to run one of the motors using a power supply from Detkin, but we were unsuccessful in getting it to work. There’s a possibility that the motor requires significantly more current to get started than the 5A max provided by the power supply.
We also struggled quite a bit in getting the wheels off the shopping cart since neither of us had any experience working with tools or dealing with metal pieces.
What we learned
While building this project was full of many woes and ultimately was unsuccessful, we gained a lot from the experience. We spent a lot of time debugging and experimenting on the circuit to figure out what was going on with it. These are pretty useful skills that will apply to future projects we’ll take on. Additionally, we learned how to be persistent and quick on our feet when obstacles came our way, whether it was quickly sourcing alternate parts when a component broke down or testing out different methods of removing the wheels from our shopping cart.
The application part of our project also came with its own set of challenges. This was the first time that either of us had worked with Android Studio or made a mobile application. The application we built relies on the Android API, which required us to navigate the unfamiliar realm of developer documentation. This was definitely in a different format than the ATMega328P datasheet we were familiar with, and required significant time investment to fully comprehend. After diving deep into a plethora of online tutorials and dissecting the developer documentation, we were able to successfully access the phone’s location to be sent to the robot so that it could be repositioned relative to the signal.
What's next for aXcess
We want to continue working on this project after the summer in order to see our robot come to fruition. Once we accomplish this, we'd like to add AI capabilities to the bot in order to get closer to our goal of easing the process of getting excess food to food banks.


Log in or sign up for Devpost to join the conversation.