-
UI
-
-
-
-

-
-

-
-
-
-


Inspiration
Many of us are students in a foreign country. Being away from home has its advantages, but it is undeniable that many times we miss our homes, our families. The idea for this robot came from the desire to have a part of us somewhere else, enabling us to have contact and interact with the people that we miss.
What it does
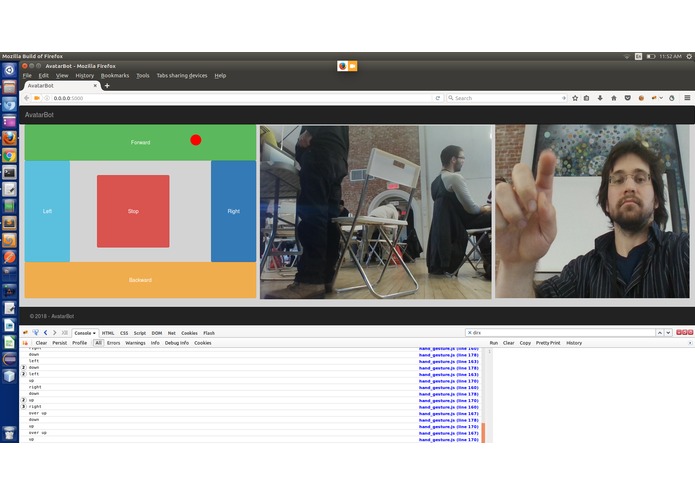
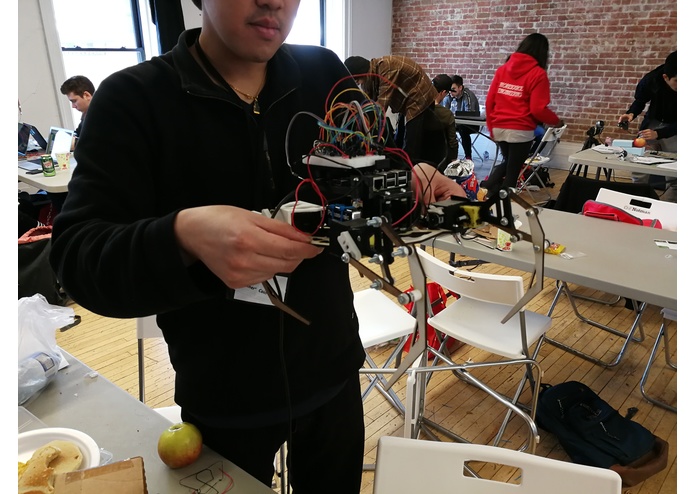
AvatarBot opens up the world for you. You can be in your room, comfortably sitting on a comfy chair, and through your laptop control the movements of the robots, which can be virtually anywhere, and through its camera you will be able to explore the landscape. The best part is that for sending commands you won't need to type anything or write fancy code. Instead, you can signal the robot with intuitive hand gesture, detected by your laptop's webcam.
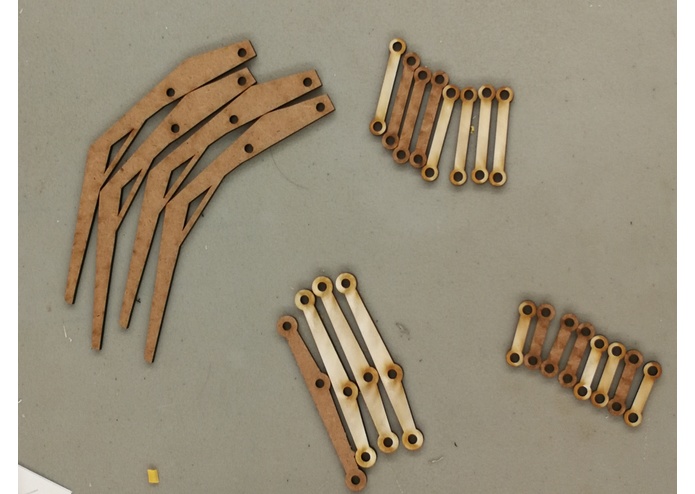
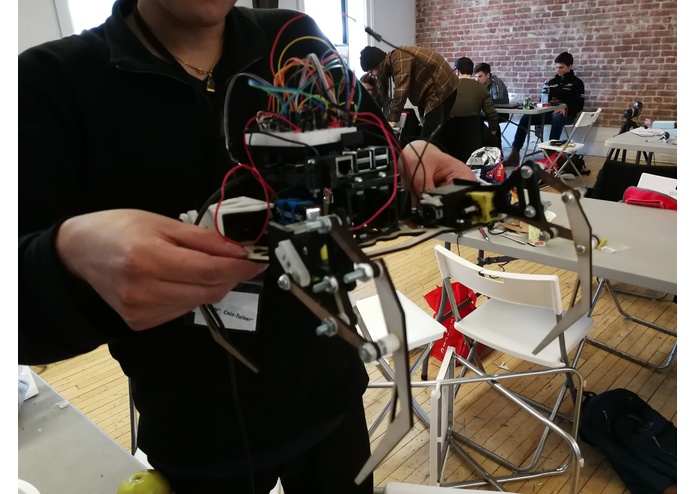
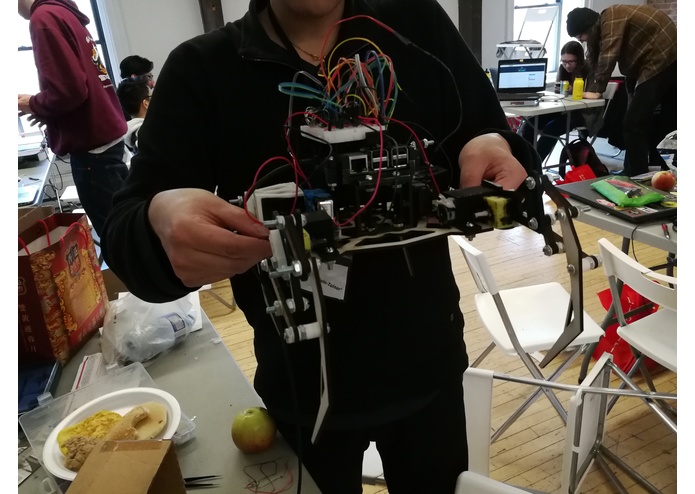
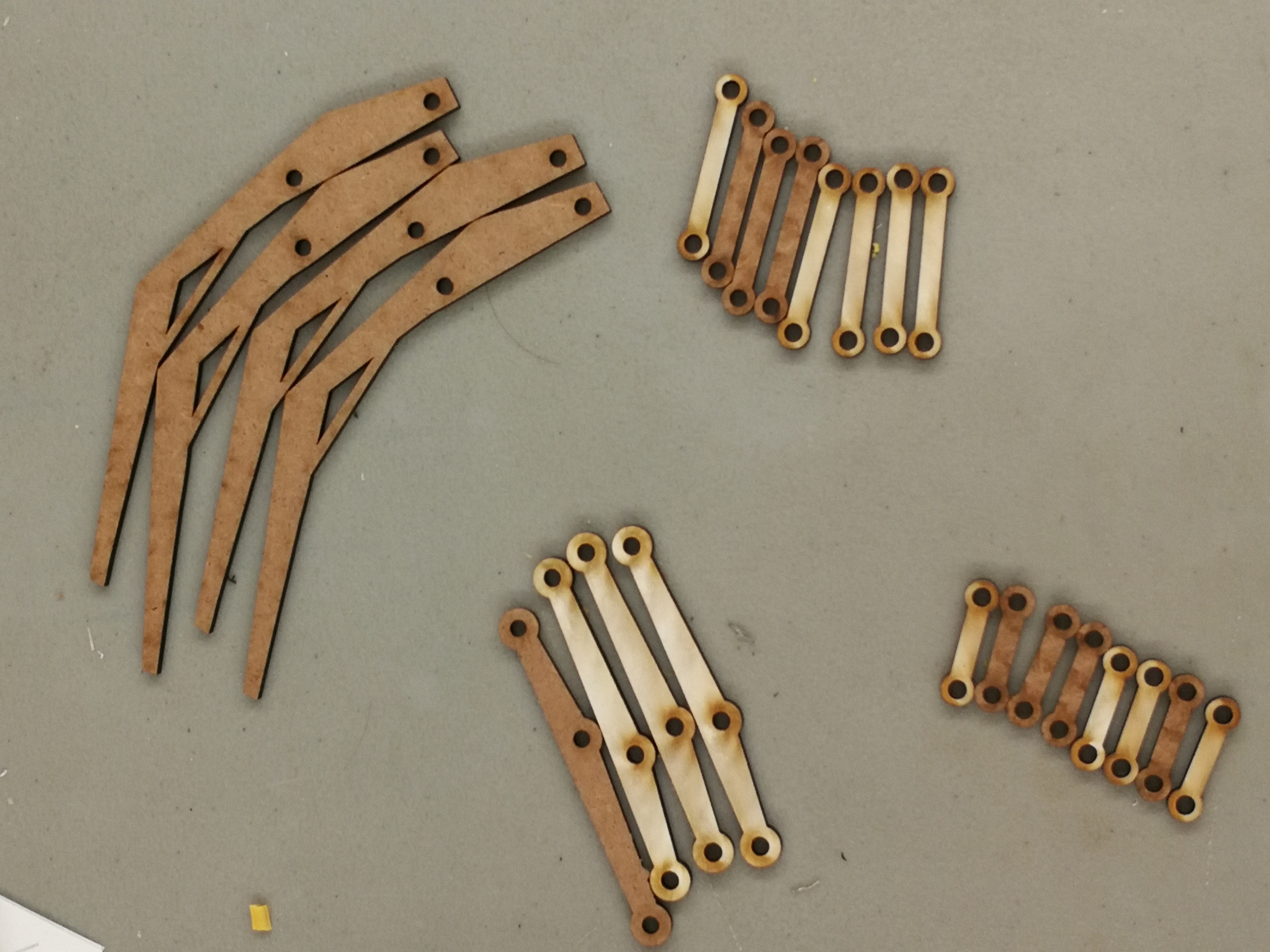
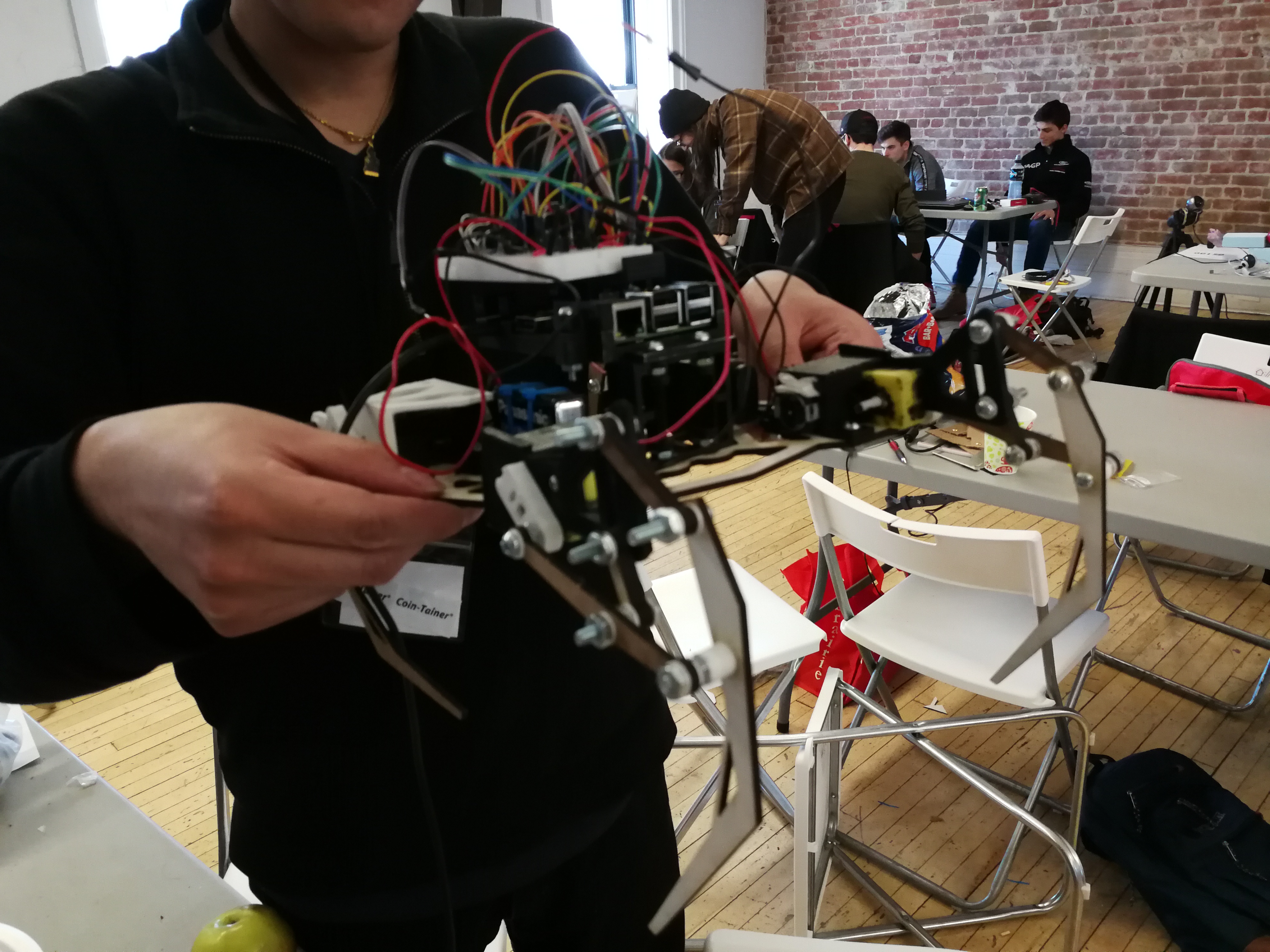
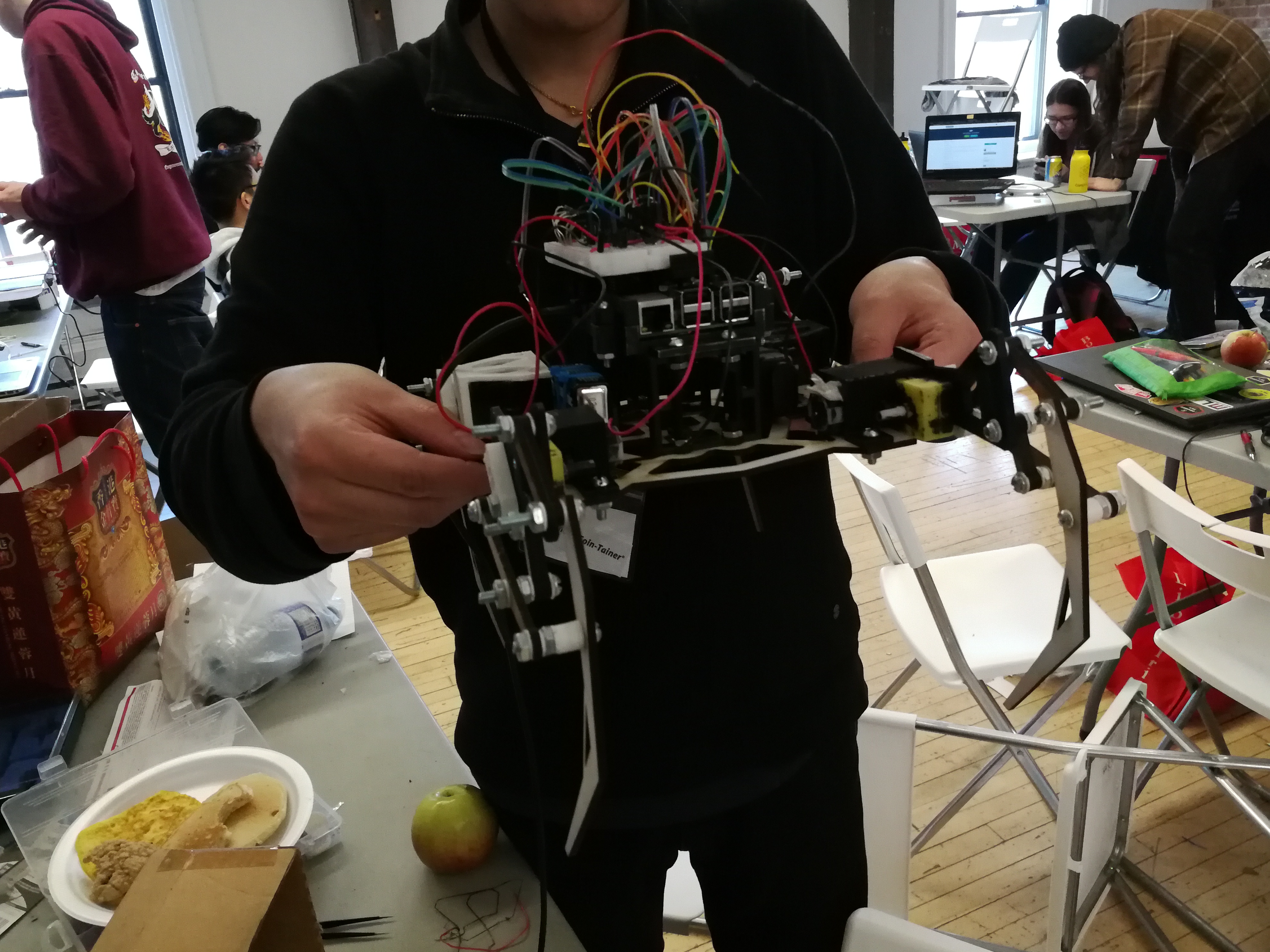
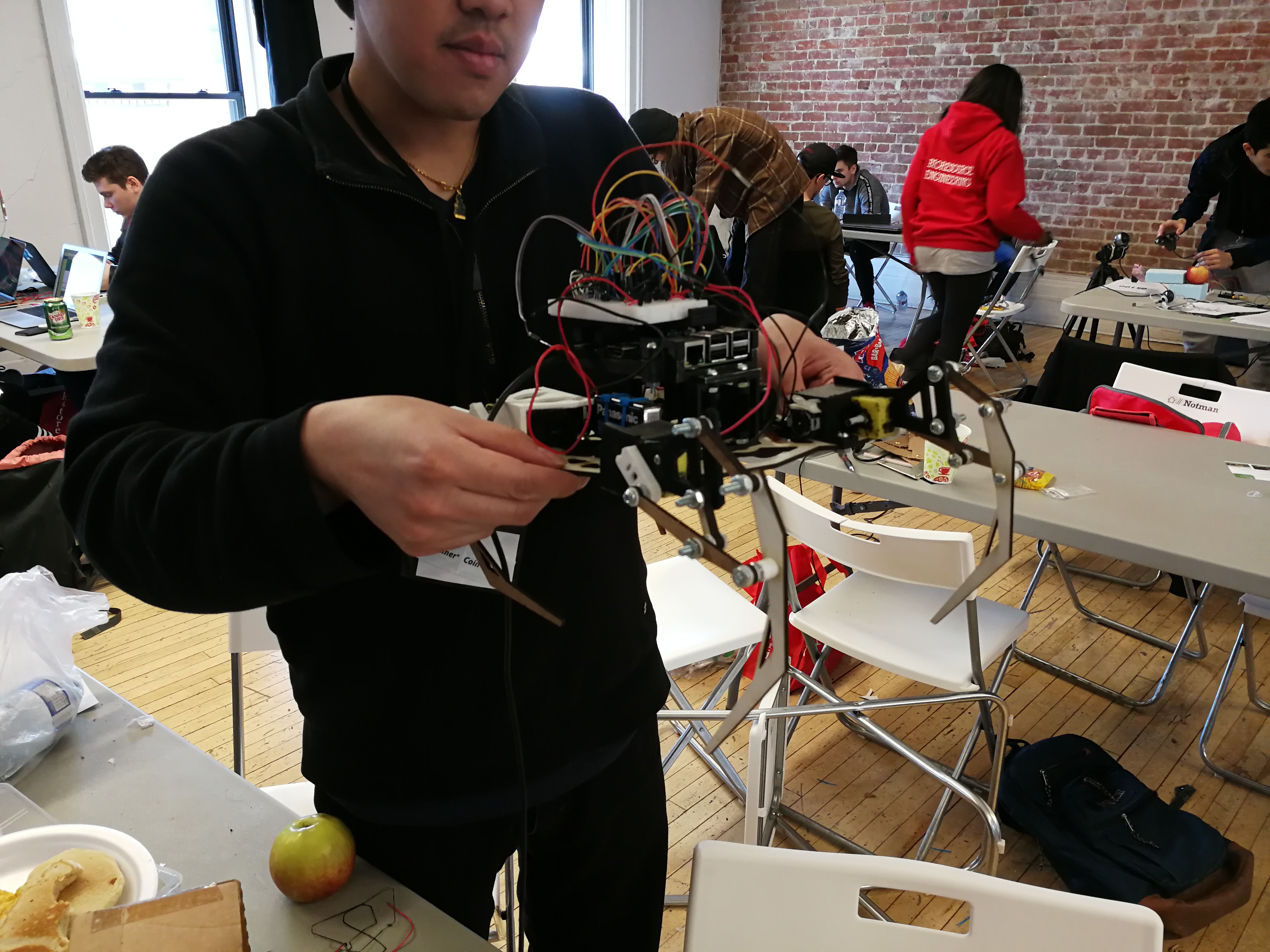
How we built it
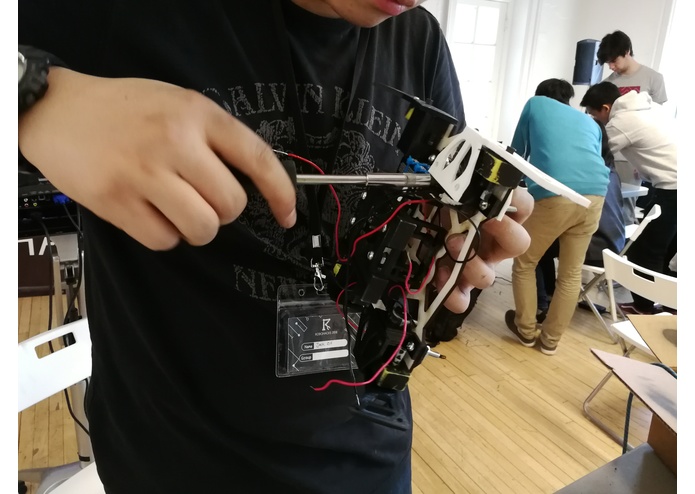
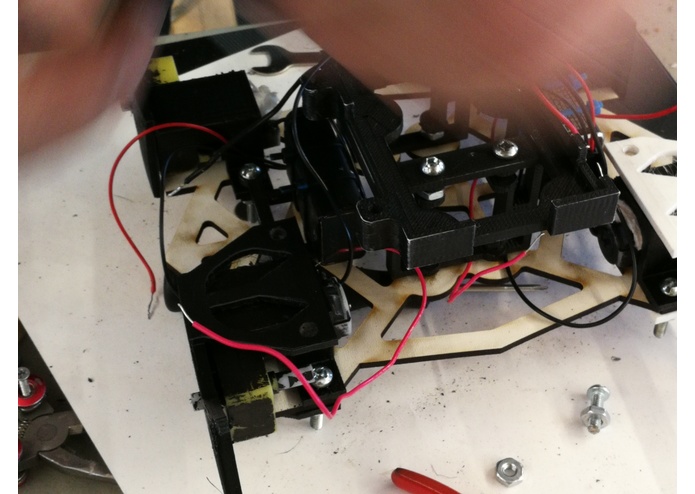
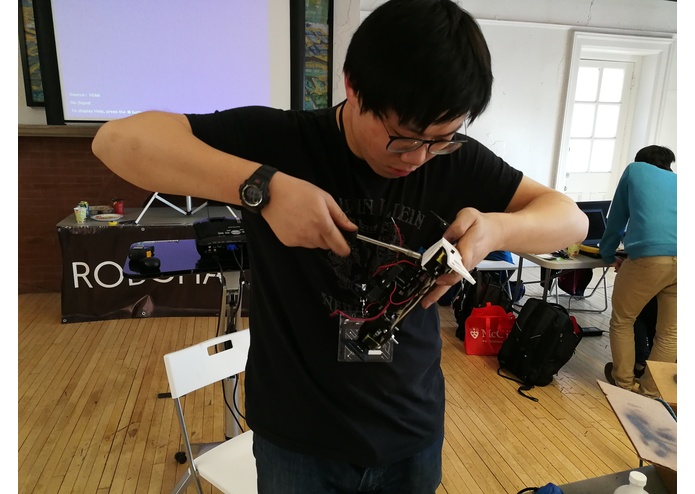
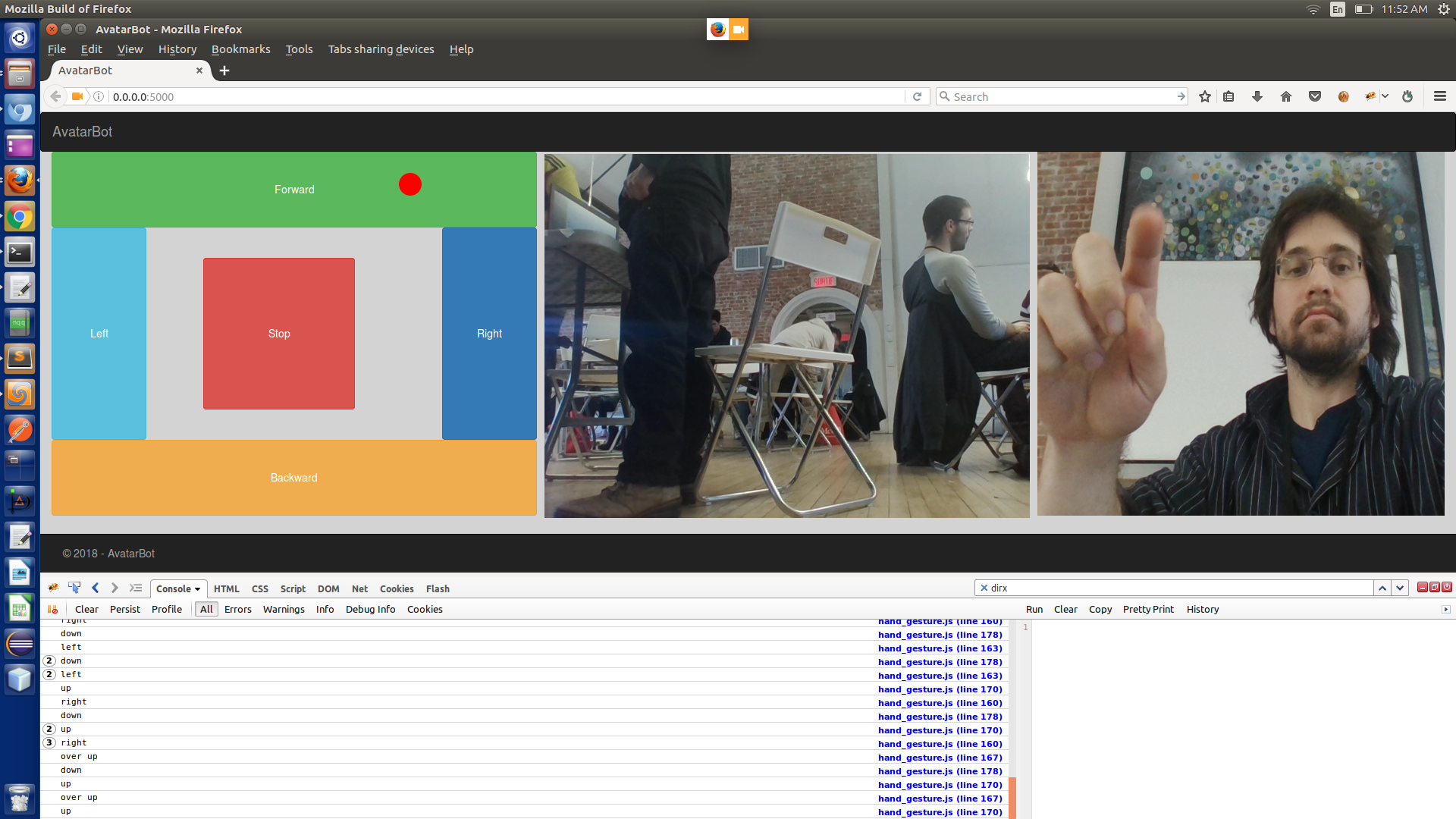
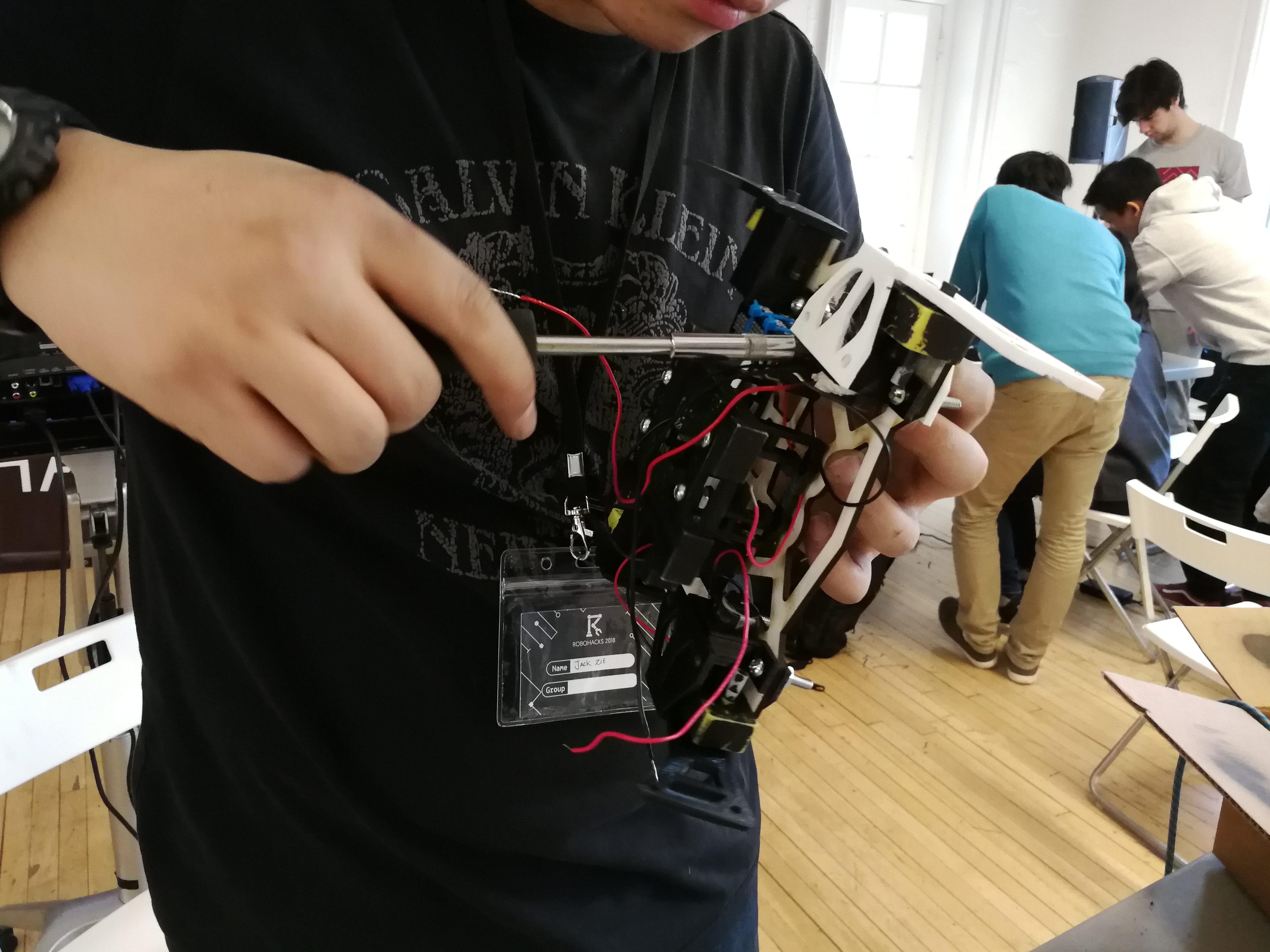
The robot itself was built using a 3Dprinter and laser cutter, which allows for an easy and fast assembly, as well as a professional-looking design. The logic is implemented in a Raspberry Pi 3, connected to WiFi network receives signals from the user's laptop, sends orders to the motors, and streams the video from the robot's on-board camera. This is done in a python script. On the other end, a javascript program uses the laptop's camera to identify hand gestures from the user, and sends the corresponding signals through the Internet.
Challenges we ran into
The main challenge we ran into was to find a reliable power source. The robot requires a decent amount of current, but we didn't want to make it too heavy. At the end, we opted for using 2 common 9V batteries because we preferred to keep the components as standard as possible.
Accomplishments that we're proud of
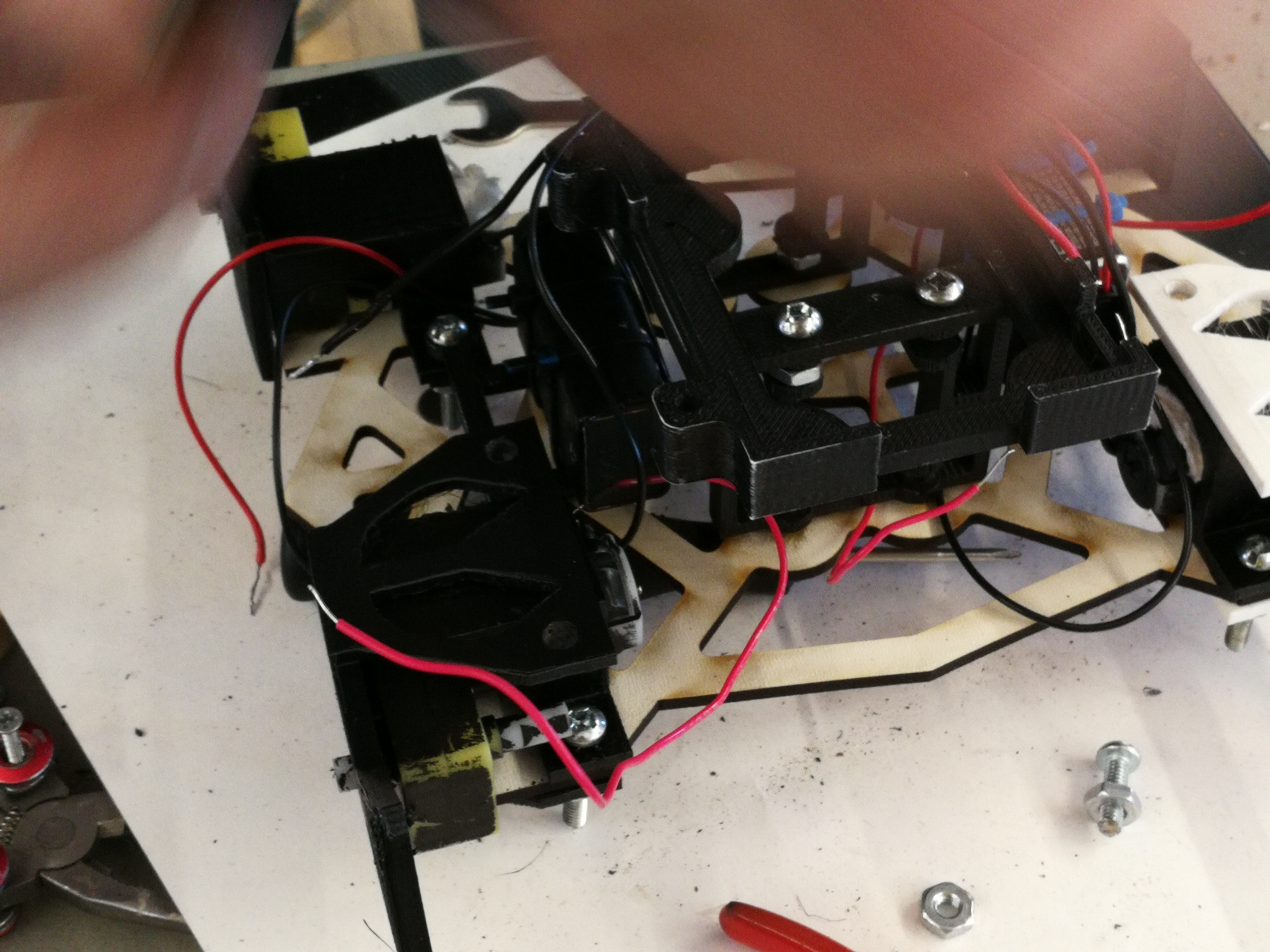
We are very proud of the systeam as a whole, because it combines several ideas in an innovative way. The motor driver circuitry and the hand gesture recognition are highlights for they robustness, and for making the AvatarBot unique.
What we learned
We learnt that sometimes it is worth it to take the extra time to make things the nice way. Instead of rushing an early prototype that is just good enough, we focused on having each component working the best we could get.
What's next for Avatar robot
For the AvatarBot, the next step is to add more functionalities, like adding a small arm that allows the robot to perform small tasks or a microphone/speaker set to have closer interaction with the receiving end. We are also interested in using an improved camera, that allows for better video quality.

Log in or sign up for Devpost to join the conversation.