Inspiration
The inspiration behind the innovation was the simplicity yet complexity of the challenge; what inspired us to take on the challenge was the fact that although it was a bit beginner friendly, it certainly did have some challenging aspects to it.
What it should do
The robot, through the use of IR (infrared) and hypersonic sensors, detects it's environment and navigates through it. Specifically, the IR sensor makes it a line following robot which allows it to follow black lines on the floor. Meanwhile the hypersonic sensors should help it navigate around physical objects and challenges (such as a maze) autonomously.
How we built it
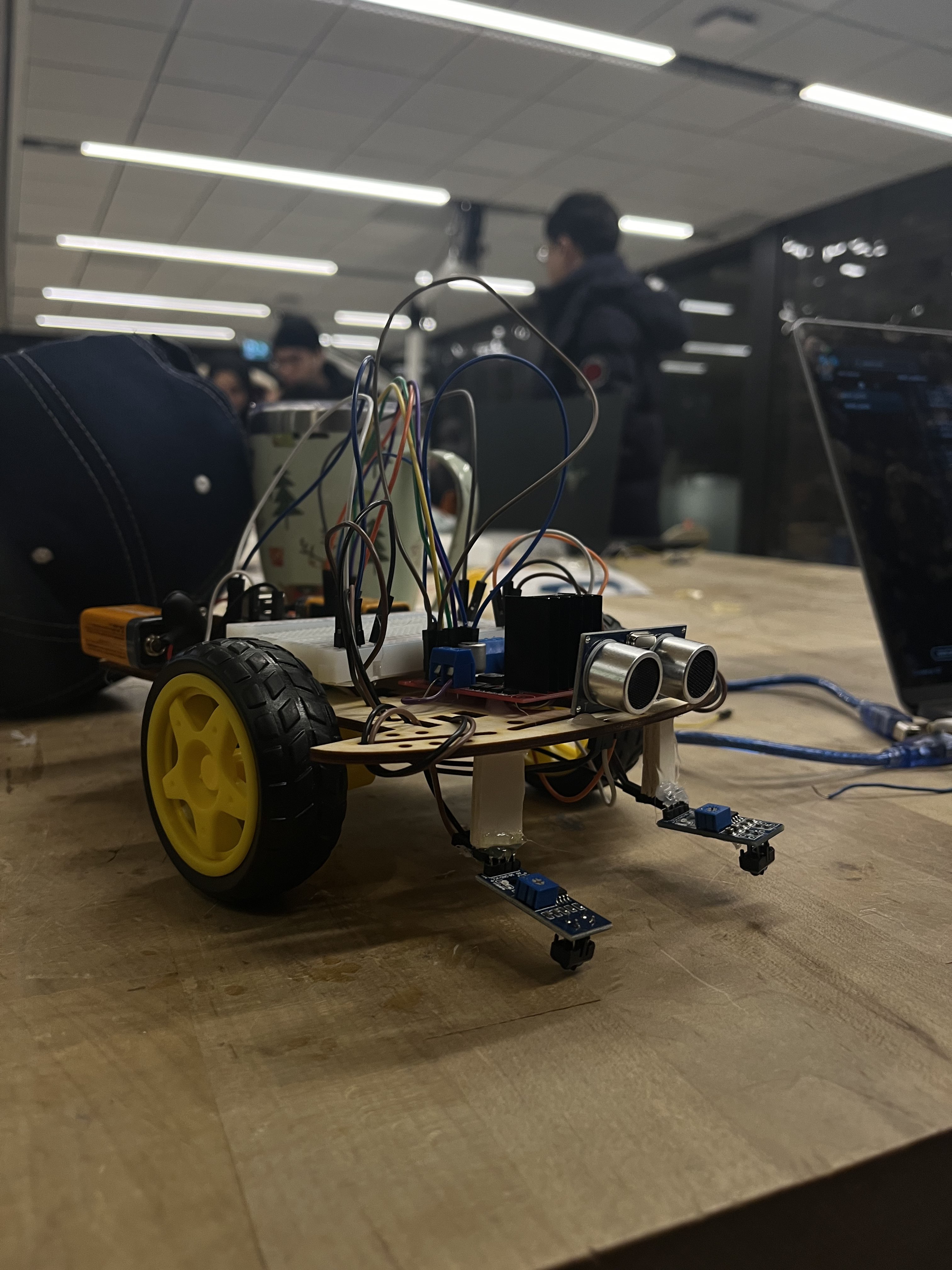
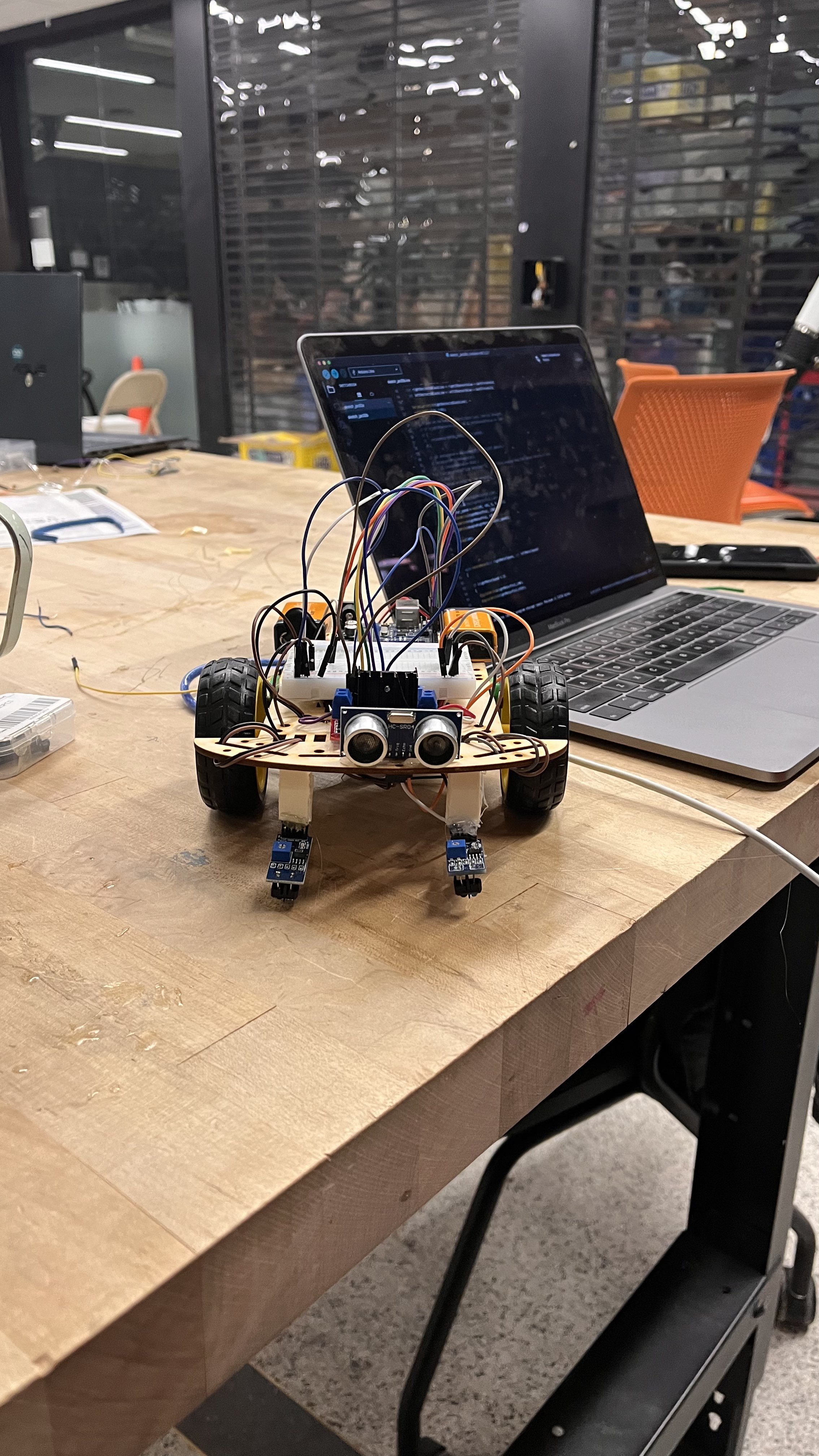
To build the robot, we used an arduino, the sensors, a breadboard, a wooden cut out of the vehicle, three wheels, two batteries, and all types of wires. Here was the process: we started off by learning about the different components of the robot (since we were beginners) and then designed models of the circuit and the vehicle in TinkerCad. Next, we modeled the car using the autocad, online resources, and mentors present within the hackathon. Then, we programmed the algorithms onto the vehicle seperately and hoped to integrate and combine them into one.
Challenges we ran into
There were many challenges but the two most prominent was the faulty equipment and a lack of expertise. The faulty equipment set us back by hours, because it would we would wonder for hours why the machines weren't working only to figure out something was wrong with the model of the arduino itself. Twice. Next, our own inexperience made it difficult to learn and create a project in a short period of time, which was exacerbated by the lack of experience by other fellow hackers and sometimes mentors that would inadvertently cause harm to our project because of tunnel vision or just a lack of experience (for example, in order to solve an issue regarding the battery, two of our laptops were short-circuited due to ill advice from a mentor as a result of this tunnel vision). At the end, however, we encountered a random challenge and our sensors unfortunately malfunctioned.
Accomplishments that we're proud of
By the end of the first day, we weren't able to come up anything. Anything. However, by pulling ourselves together we were able to create our first robotics project from scratch. What made us proud was the sheer difficulty and hours we spent behind this accomplishment; the sleepless hours and the caffeine-filled boosts of motivation fuelled us to complete this physical model which is what really made us proud.
What we learned
Two thing: perseverance and carefulness; never underestimate technology and never underestimate what you can achieve and do by hardwork.

Log in or sign up for Devpost to join the conversation.