-
-
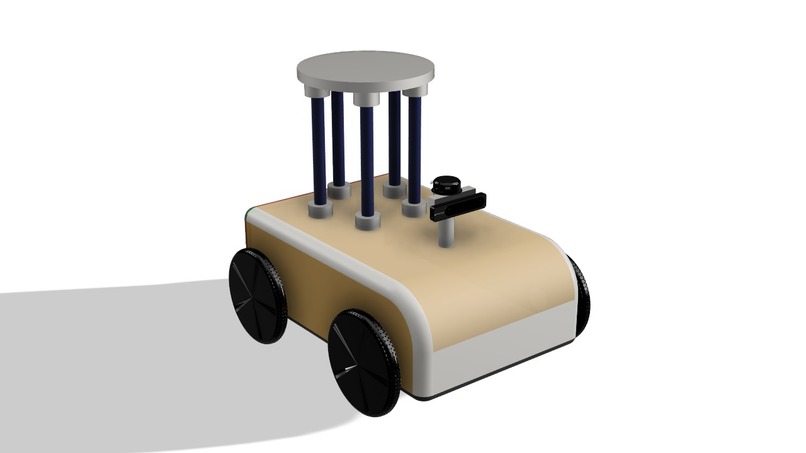
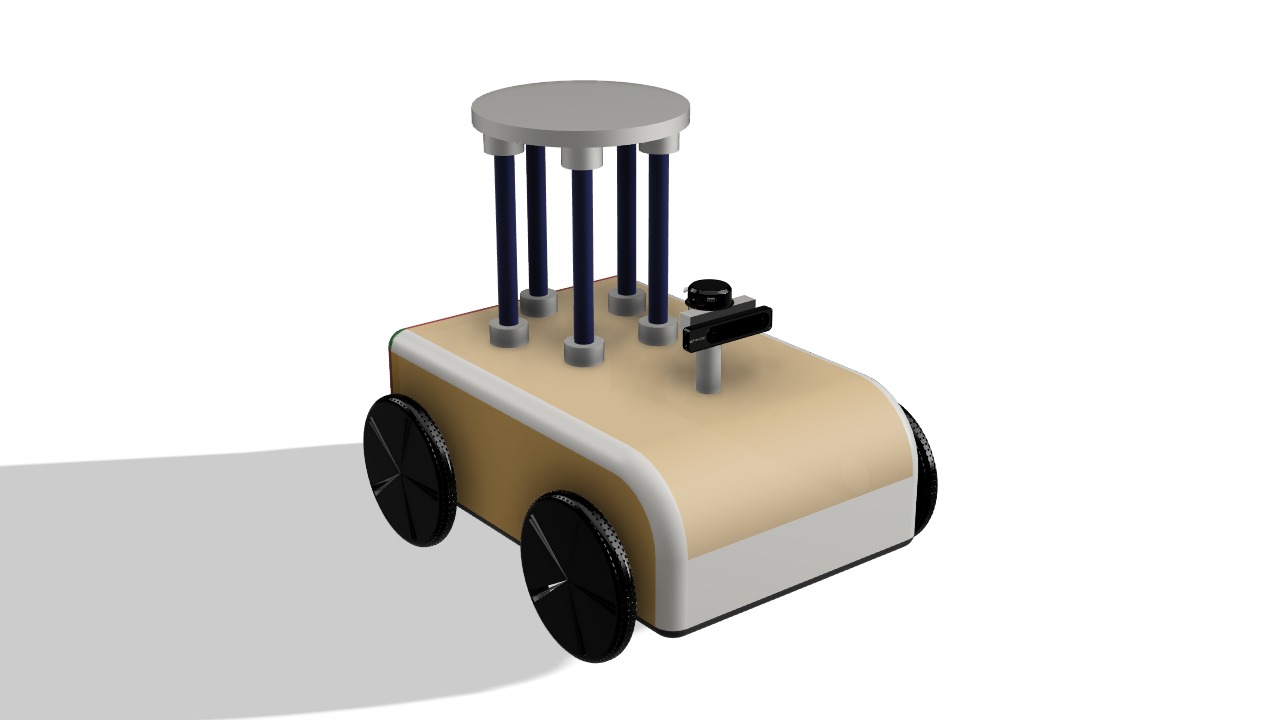
Design of the Robot
-
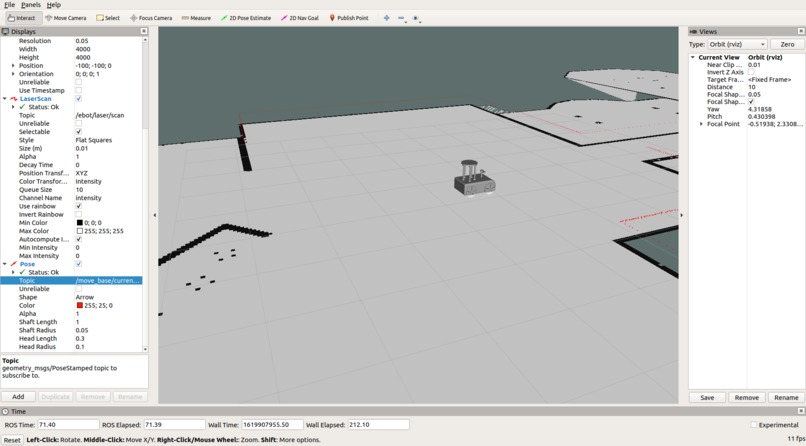
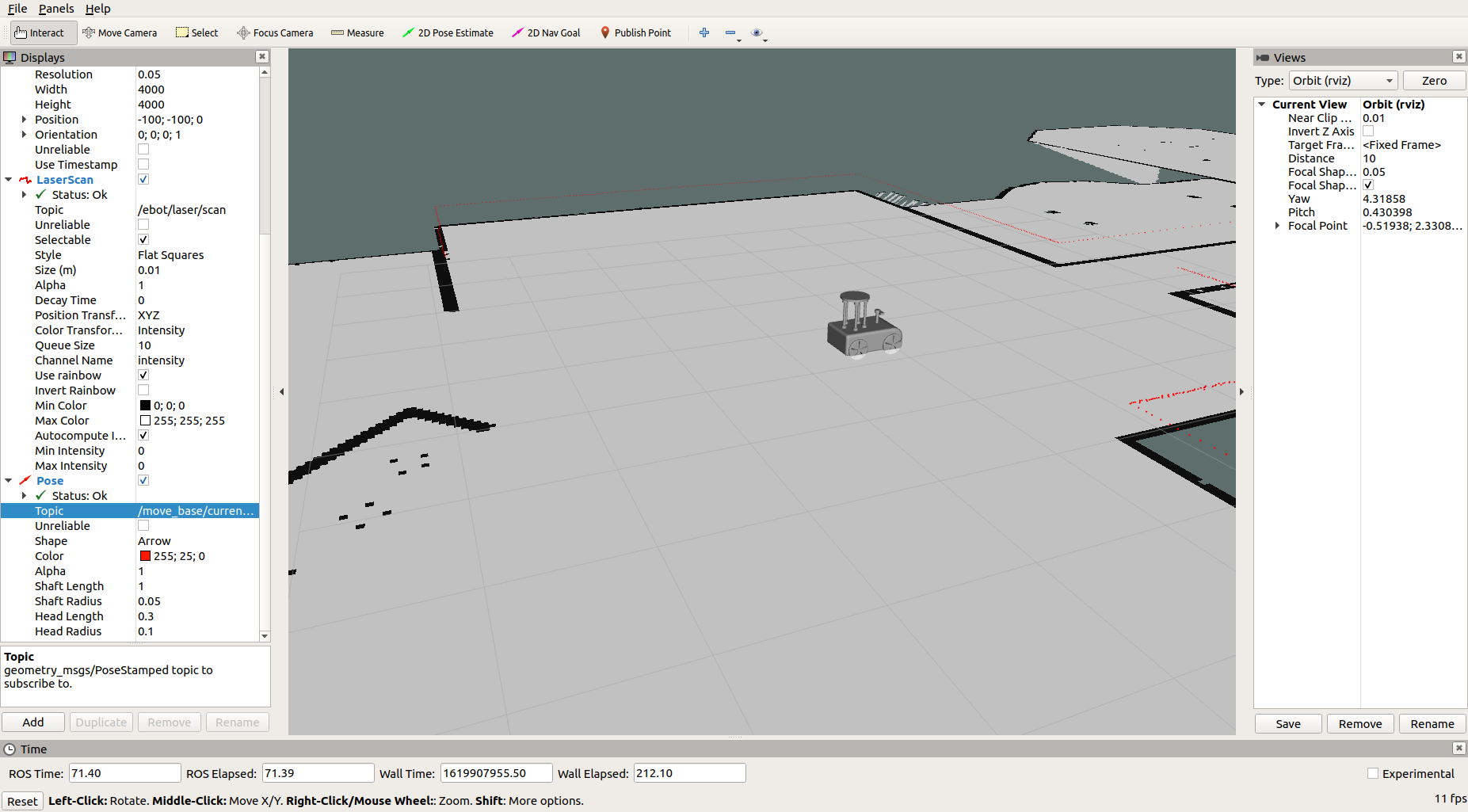
Visualization of the generated map along with the laser scan from the lidar
-
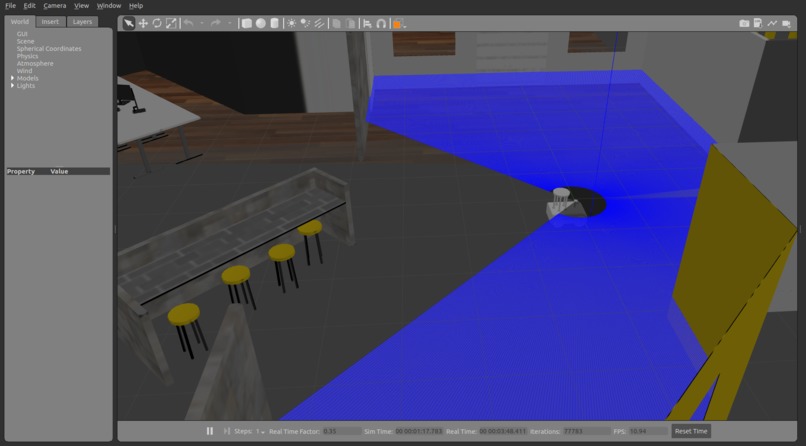
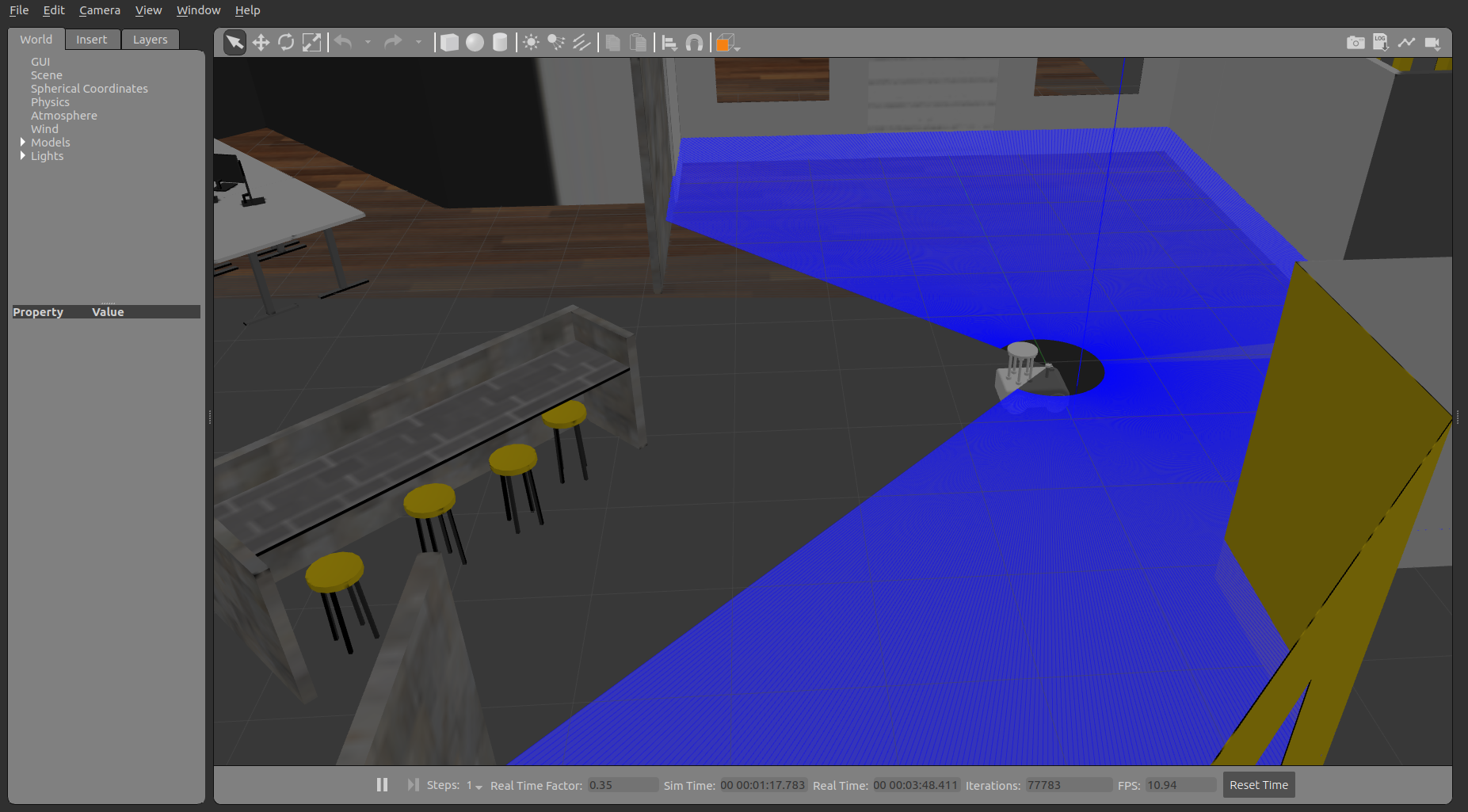
Robot autonomously navigating in the simulation environment on Gazebo
Inspiration
The COVID 19 Pandemic has affected numerous people and their livelihood. And created a new way of living. The major tasks that need to be done are to maintain Proper Public Sanitization and Maintain Social Distancing. As a team of robotics enthusiasts, we ideated to create an autonomous UV sanitization robot that can help in achieving both the tasks of Proper Public Sanitization and Maintain Social Distancing. These robots limit the human interactions that can cause in the process of public sanitization and robots can work all around the clock, thus maintain proper sanitization 24/7. During the pandemic period, robots are the best choice for particular works like sanitization.
What it does
AUVS bot once deployed in an environment can autonomously navigate and sanitize its working area using UV lights once it maps its working environment by itself. The sanitization process of the bot uses the principle of Ultraviolet germicidal irradiation, this is a highly effective technique as it can cause damage to the virus at a molecular level. It is mounted with 5 individual UV lamps to cover all the blind spots. It has dynamic path planning and obstacle avoidance system. It can evade any obstacle in its way still sanitizing the entire area.
How we built it
The entire project was build using Robot Operating System (ROS). ROS is a publisher-subscriber model. The design of the robot is done on Autodesk Fusion360 Software which later exported to ROS. Once the robot model is exported from Fusion 360, all the necessary gazebo plugins are manually added to the URDF file. The simulation environment and the robot model are spawned in the gazebo. The robot is mounted with an RPlidar, Intel Real Sense Depth camera, encoder, and an IMU sensor. Once the sensor values are properly published by the gazebo engine, Rviz is used to visualize all the sensor and robot model.
1) Gmapping , a process of mapping the working environment from the lidar and odometry values is done, and the generated map is saved.
2) To Localize the robot in the map Adaptive Monte Carlo Localization algorithm is used.
3) Once the robot is localized, Global and Local cost maps are generated from robot pose estimation from the localization algorithms.
4) Using A* algorithm for the global map and Dynamic Windowed Approach is used on the local cost maps to find the best path for the robot dynamically.
With the synchronization of various sensors values and algorithms autonomy of the robot is achieved by using the ROS framework.
ROS Navigation Stack of the Project

Challenges we ran into
The major challenges are importing the CAD design from Fusion360 into ROS and Fine Tunning the AMCL and Path Planning parameters. The working axis of the Fusion360 and ROS are different and the transforms produced by the URDF are the most important things upon which the entire tech stack depends upon.
What's next for AUVS Bot
Waypoint navigation can be implemented by fusing GPS, Odom, and IMU data using Extended Kalman Filters, which can increase the further area of operation.
Built With
- amcl
- autodesk-fusion-360
- gazebo
- python
- ros
- rospy
- rviz
- slam




Log in or sign up for Devpost to join the conversation.