-
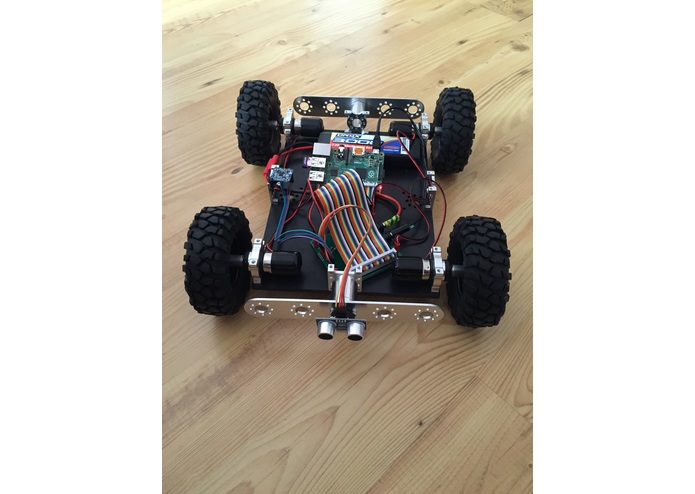
Very first version :)
Inspiration
I think the future is for automated computer driven cars. Nowdays it's a very hot topic and super exiting for me. So inspiring to create something new and different from ordinary.
What it does
The main goal is to be able to navigate to robot itself from A point to B avoid the obstacles and constantly building the map, so it can calculate more accurate path.
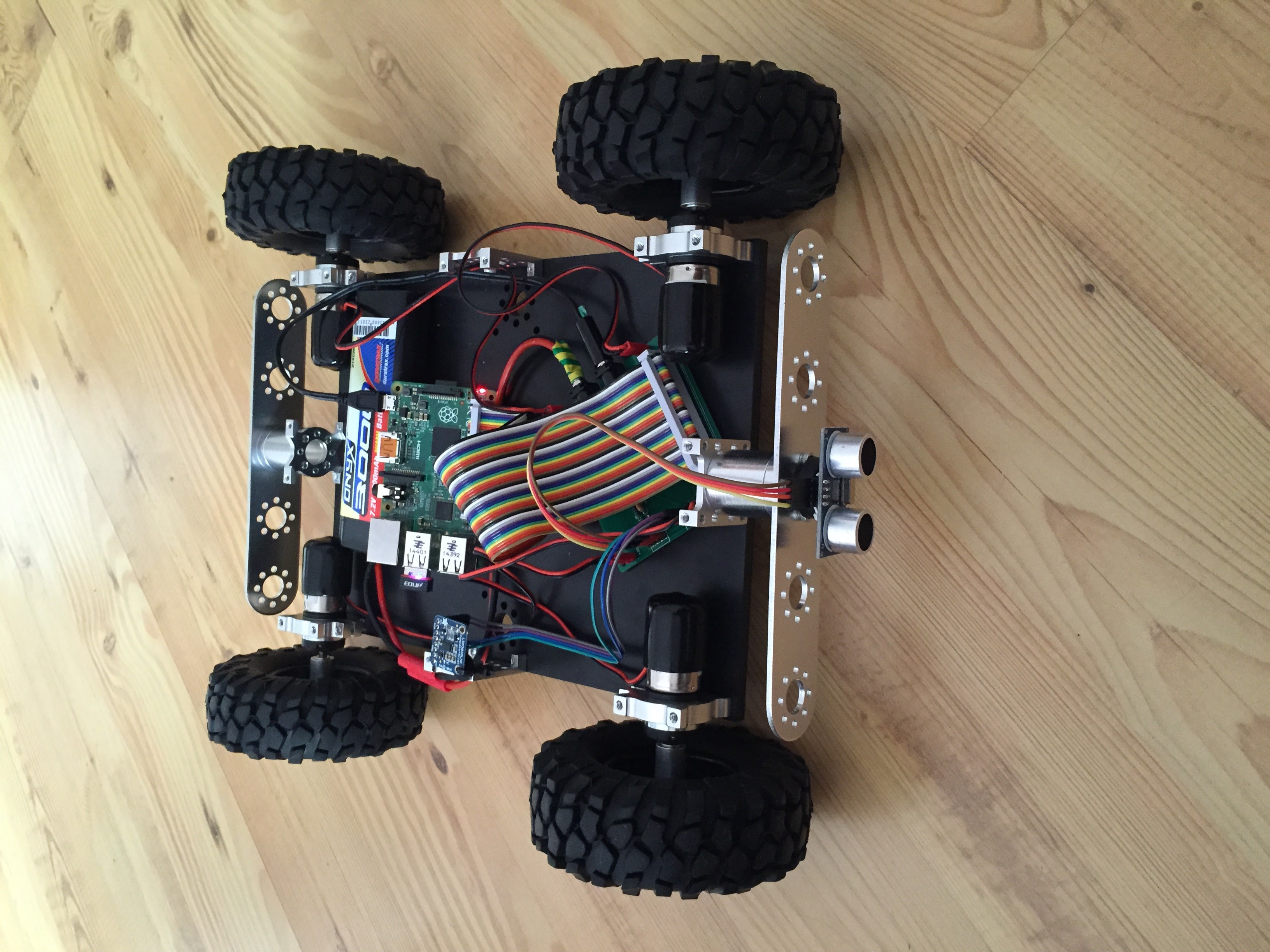
How I built it
It has a simple chassis with 4wd, which means that steering is by rotating the left and right side motors in the opposite direction. On the board there is a Nvidia Jetson TK1 supercomputer(was Raspberry PI 2) to be able to use image processing(getting distance form an obstacle, determine good path etc).It also has 10DOF imu board to get the orientation mainly.
Challenges I ran into
Actually everything was a challenge for me and there are a lot of others that need to be solved, but the challenges were find the right hardwares and make them compatible with each other.
Accomplishments that I'm proud of
When the really first version was done, and i could control it via web and observe how that simplest obstacle avoiding works.
What I learned
I can't really list all the things i learnt yet. I learnt python, c++, electronic circuits, nodejs, design PCB's and so on...
What's next for Autonomus robot car
Now i working on implementing a depth camera system into the robot (working with the Jetson) and make the whole system work with ROS. Find a good solution for indoor positioning.

Log in or sign up for Devpost to join the conversation.