Autonomously and Remote-Controlled Robot
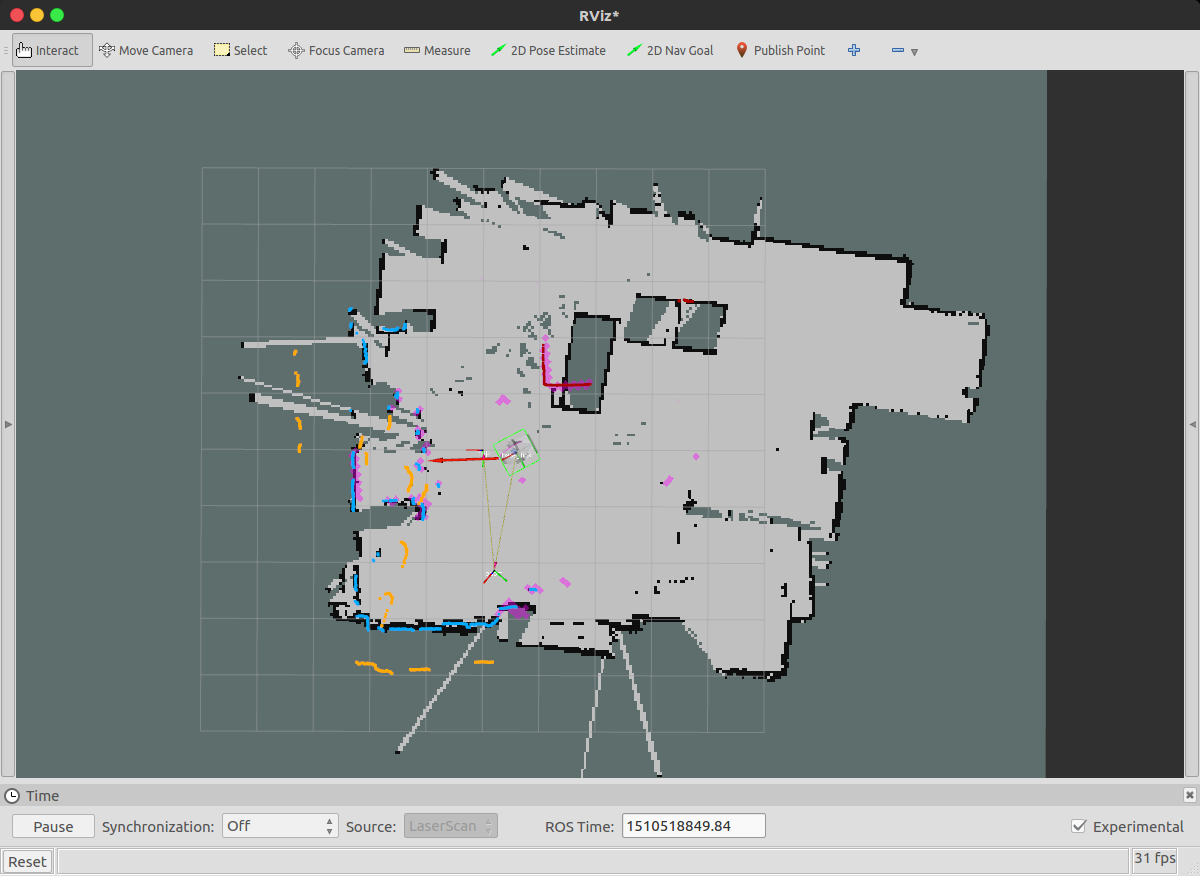
Generated a 3-D mapping of healthcare facility rooms using 3-D Simulation Localization and Mapping (SLAM) using Kinect 3D scanner, Li-DAR, ultrasonic sensors, and high-resolution spatial data.

Updates

Leave feedback in the comments!
Log in or sign up for Devpost to join the conversation.