Inspiration
We took part in a sumo_bot competition and we want to apply the new idea of our car in this competition. So we try those new designs and ideas in this vehicle.
What it does
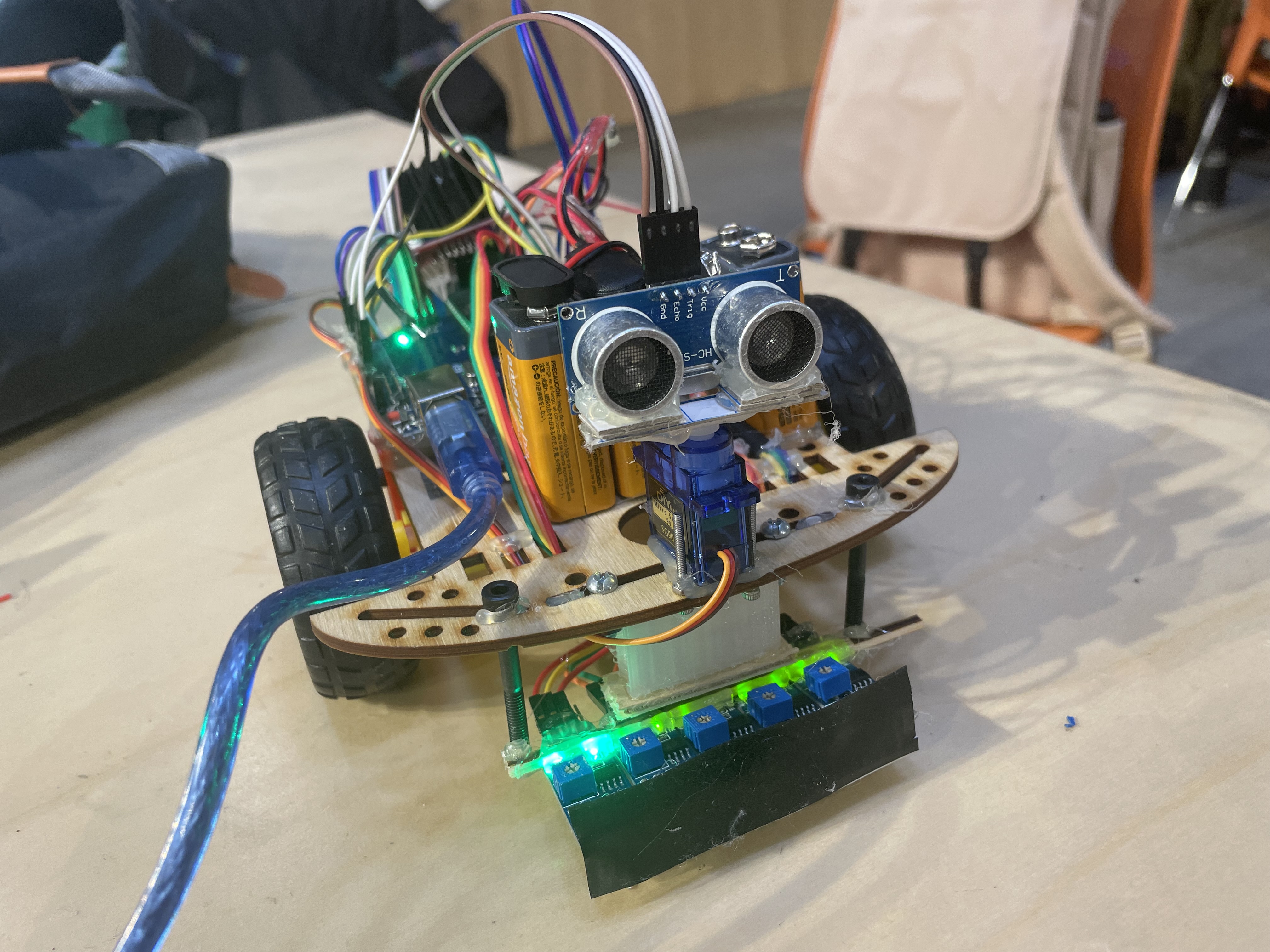
So in this vehicle, we try to use more qtr sensors to track the line, and by adding the servomotor, the vehicle does not need to turn itself for scanning, but we can control the direction of ultrasonic, in this case, we can scan the object more efficient.
How we built it
We mainly using soldering, glue gun and other common tools to construct the base, structures of the cart. Then aoolying electrical testing, wire routing those skills to create convinence for software testing. Generally the assembly rules and standard are followed to make sure the cart is qualified.
Challenges we ran into
The most challenges we faced was when we tested our vehicles, a very common situation was that the components which were provided by Utra Hack are broken very frequently. So the biggest issues was how to detect whether it's a code issue or the hardward issue. So we spent a lot of time to rebuilt the vehicle and have a very little time to fix our code.
Accomplishments that we're proud of
There is one thing we're proud of is the assembly designing. Via the given component, we can build a whole runable car, and base on our flexiable designing, whenever the component is broken or runnning out of the bettry, we can easily change it or fix it.
What we learned
According to the previous question, the first thing we learned about is we need to build a standarize testing process, so we will not waste so much time to think if there is a sofeward issue or the hardward issue. The second thing we learned about is that when we thought how to solve the maze course, we were inspired by "micromouse", and knew how to use water slove the maze, that's a very new idea of the logical thinking.
What's next for Autonomous_vehicles
First, we consider use multiple ultrasounic , so it will reduce the time of scanning, and that, for the maze question, we will build a function or method of optimization which will find the cloest road. Second, we will use the better components, so we don't need to spend so much time to fix the car. Third, we will replace the qtr sensors with higher accuracy.

Log in or sign up for Devpost to join the conversation.