-

Second Place Prize
Inspiration
It is our first time building an autonomous vehicle using Arduino.
What it does
For robots to move beyond the assembly line, they have to deal with the uncertainty of navigating through unknown terrain. Obstructing objects, random forces, and moving beings are all unpredictable aspects they must be able to handle.
How we built it
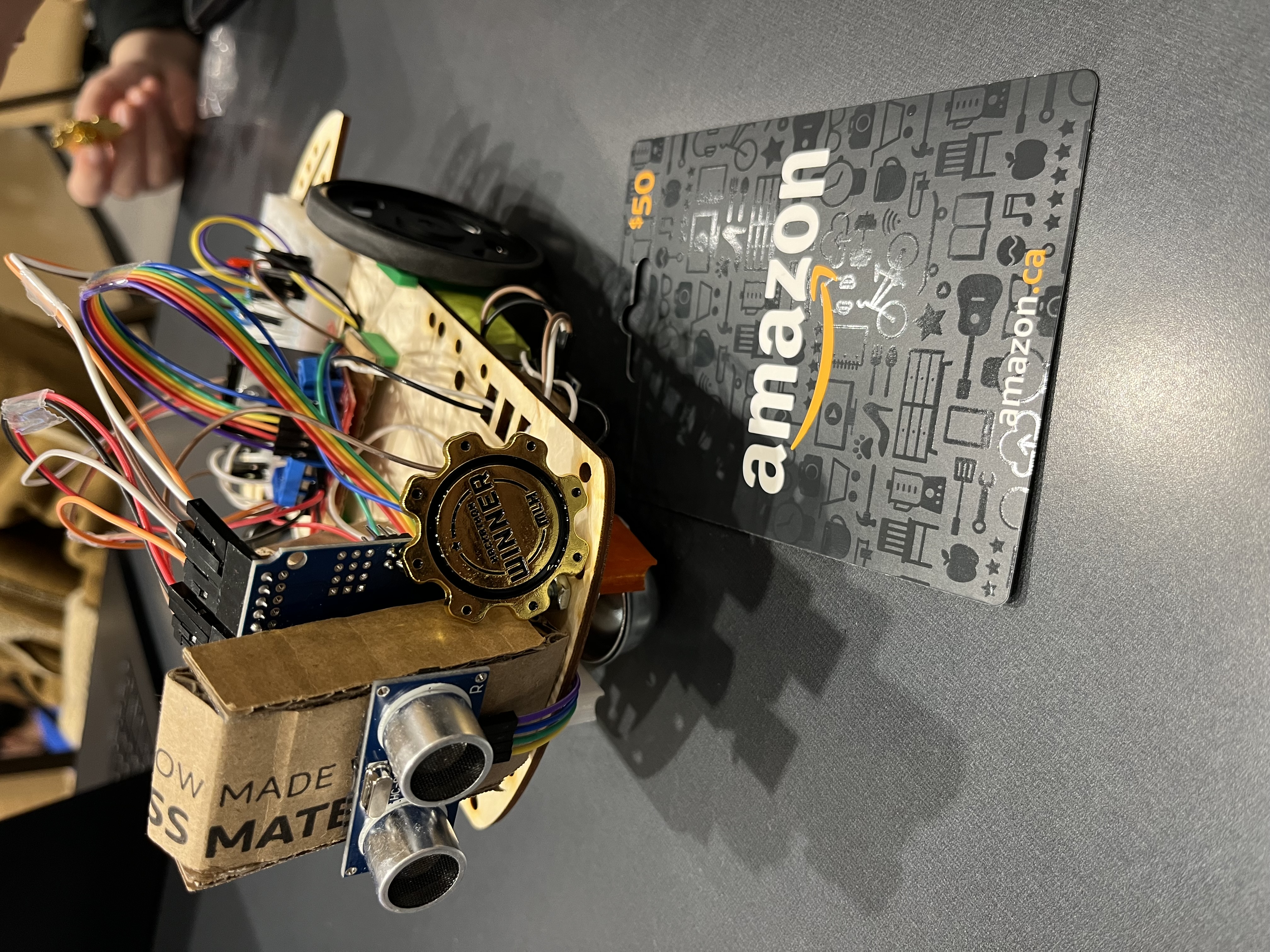
Built using an Arduino UNO R3 Board, we assembled the vehicle, ensuring wires were accurately routed. Two DC motors and Motor Drive Expansion Board drove the vehicle, while ultrasonic and infrared sensors allowed it to evade obstacles and accurately follow a designated path laid out by a black line.
Challenges we ran into
Since we are all software background, assembling the vehicle took a little bit more time for us. For example, when we initially plugged the battery to Arduino board and motor drive expansion board, the motors failed to run simultaneously. We later discovered that the battery needed to be directly plugged into the motor drive expansion board in order to supply sufficient power for movement.
Accomplishments that we're proud of
As our first time building a piece of hardware as well as participating in a hackathon, we were very proud of our ability to create a robot which successfully avoids objects and tracks lines. With our new found knowledge we can continue more endeavours in robots!
What we learned
- How to use Arduino.
- Assemble hardware and use software to control a robot.
- Identifying how to make a Autonomous Vehicle.
- More general knowledge of robotics.
What's next for Autonomous Vehicle (AV) Challenge
Now that it can avoid obstacles and arrive at the right destination, the next challenge will be what we can apply it for.





Log in or sign up for Devpost to join the conversation.