-
-
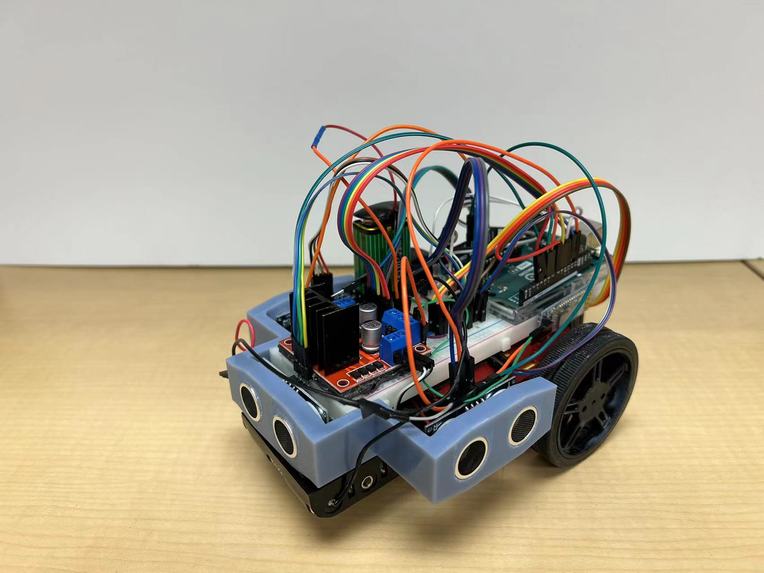
Photo of the design
-
-
-
Driven by the enthusiasm in the recently boosting development of the autonomous electric vehicle, we carried our final project regarding building a mini autonomous vehicle (size ~ 10cm scale). The objectives of the design mostly come from the fundamental features of a real-size electric vehicle, such as obstacle avoidance, recognition of traffic signals, path reconstruction, and etc. In this work, we realized all the desired functions by integrating ultrasonic distance sensors, RGB color sensor, bluetooth module, and motor control module, and we have demonstrated the effectiveness of our design in some simple mazes. Not only is this project a platform for us to practise skills learnt from ESE519, it also taught us, during practical applications of embedded systems, how to counter unexpected challenges, such as inconsistent supply voltage, blindspots from the sensor, and mechanical design failure.






Log in or sign up for Devpost to join the conversation.