-

Hi
-
Wavin' at you this Sunday

Inspiration
So there I was: sitting on a bench minding my own business. All of a sudden, a voice yelled "Hello!" at me. I was startled and confused, and I missed my chance to respond. Epiphany struck; the answer was obvious: I must build a robot to wave hello to every human being on the planet.
What it does
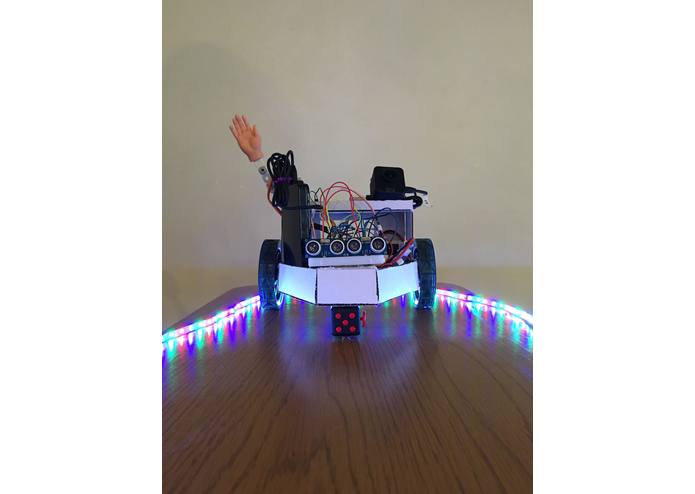
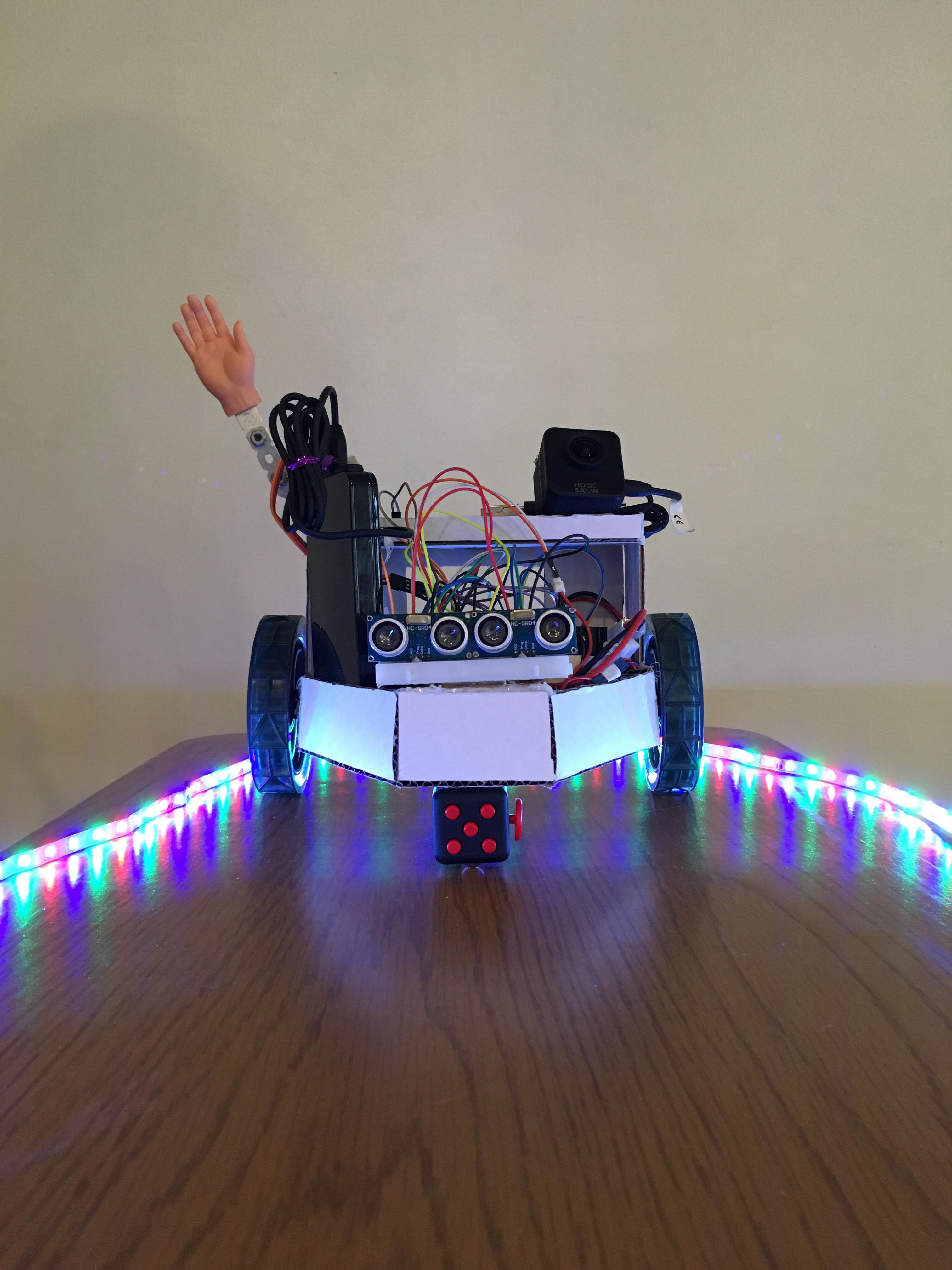
The bot's automotive capabilities are controlled via Arduino Uno. DC motors form a closed feedback system with twin ultrasonic sensors mounted on the front of the chassis for collision avoidance. The computer vision aspect is managed with a Raspberry Pi 3 .
How we built it
It's made of cardboard, spare aluminum, sensor modules, and a fidget cube. We're not kidding, the fidget cube is being used as a caster on the front of the bot.
Challenges we ran into
Calibration of the ultrasonic sensors was the biggest struggle. Environmental conditions and oncoming objects' shapes wreak havoc on accuracy, so we've tried our best to mitigate that error.
Accomplishments that we're proud of
Facial recognition is a huge feature we're proud of since it took hours of tinkering with variables to get the calibration right.
What we learned
The standard Arduino servo library is garbage.
What's next for Jeam Bot with the silent K
An LCD face. Cannons.
Built With
- arduino
- camera
- figetcube
- hands
- raspberry-pi
- servo
- ultasonic
- vex
Log in or sign up for Devpost to join the conversation.