


Inspiration
The primary inspiration was the observation of scattered, easily collectible litter (like crumpled paper and plastic cups) in office and lab environments. This seemingly minor issue creates constant clutter and requires staff time for manual cleanup. We envisioned an autonomous solution that could maintain cleanliness efficiently, allowing human personnel to focus on high-value tasks. Our goal was to prove that complex, ROS-based mobile robotics could solve simple, everyday environmental maintenance problems.
What it does
Robotrash is an autonomous differential-drive mobile robot designed for indoor litter collection and disposal in an office setting. It performs a complete cleaning cycle:
- Localization and Mapping (SLAM): It uses LIDAR to map the environment and localize itself within that map.
- Litter Detection: It uses Computer Vision (CV) via a camera to identify and classify common office litter.
- Path Planning: It calculates a collision-free path from its current position to the detected litter.
- Acquisition: It utilizes an end-effector/gripper system to successfully acquire the object.
- Disposal: It navigates to a predefined waste receptacle and releases the litter.
How we built it
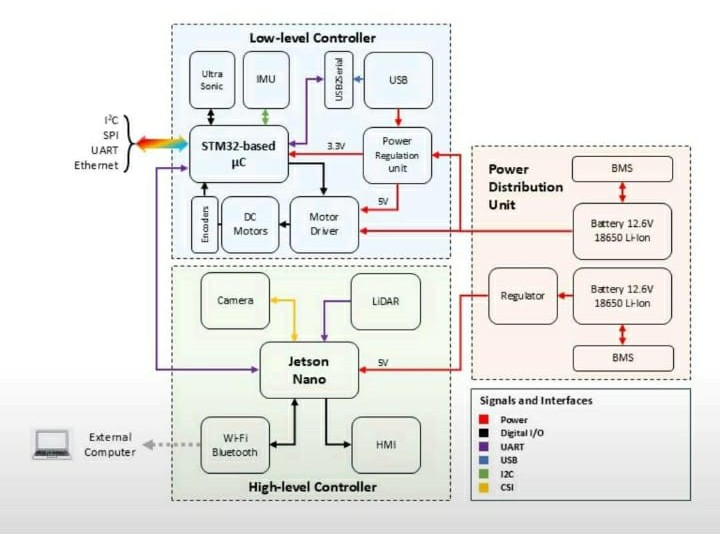
We implemented a Hierarchical Control System using specialized components for high-level decision-making and low-level control: • Software Framework: The entire system is built on the Robot Operating System (ROS), specifically using ROS 2 principles for robust inter-process communication (Python and C++ nodes). • High-Level Control: A Raspberry Pi (or Jetson Nano) handles the complex cognitive tasks, including SLAM (using a LIDAR), Computer Vision (using a pre-trained YOLO model for litter detection), and Global Path Planning (using the ROS Navigation Stack). • Low-Level Control: A Pixhawk (STM32-based controller) manages real-time, high-frequency tasks: motor control, sensor fusion (IMU, Encoders, Ultrasonic), and translating the high-level velocity commands into precise motor PWM signals. • Communication: MAVROS or Micro-ROS facilitates reliable serial communication between the Raspberry Pi and the Pixhawk Key Technologies Used: Python, C++, ROS 2, Ubuntu, PX4 Firmware, LIDAR, Computer Vision (YOLO/OpenCV), Embedded Systems (STM32/Pixhawk), DC Motor Drivers.
Challenges we ran into
- High-Level/Low-Level Communication: Establishing robust, real-time communication between the high-level (RPi/ROS) and low-level (Pixhawk) controllers via MAVLink proved complex, especially ensuring the odometry feedback was accurate for SLAM.
- Object Pose Estimation: Accurately calculating the litter's 3D coordinates (x, y, z) relative to the robot was challenging due to the need for precise camera calibration and depth perception to align the gripper correctly.
- Gripper Design: Designing a simple gripper that could reliably acquire irregularly shaped or flat objects (like crumpled paper vs. plastic cups) required iterative mechanical design. Accomplishments that we're proud of • Successful Hierarchical Integration: We achieved robust, real-time communication between the Linux-based RPi and the RTOS-based Pixhawk, demonstrating a complex, industry-standard control architecture. • Accurate SLAM and Navigation: The robot can autonomously map an environment and navigate collision-free to a specified goal location. • Proof of Concept for CV: We integrated a working Computer Vision pipeline capable of classifying target litter from the camera feed in real-time.
Accomplishments that we're proud of
Seamless Hierarchical Integration: Successfully established real-time communication between the high-level Linux-based controller (Raspberry Pi/Jetson Nano) and the low-level Pixhawk microcontroller. This integration demonstrated a scalable, industry-standard architecture that merges AI-driven perception with embedded motor control.
Autonomous SLAM and Navigation: Implemented a functional SLAM system that enables Robotrash to autonomously map indoor environments, localize itself, and navigate toward targets while avoiding obstacles, a key milestone in mobile robot autonomy. Functional Litter Detection Pipeline: Deployed a real-time computer vision system using a pre-trained YOLO model and OpenCV to accurately detect and classify common office litter, such as crumpled paper and plastic cups.
Reliable Object Acquisition and Disposal: Designed and tested a simple yet effective gripper system capable of picking up and depositing irregularly shaped litter, validating the robot’s complete clean–dispose cycle. ROS 2 Multi-Node Communication Success: Developed and synchronized multiple ROS 2 nodes handling SLAM, CV, navigation, and actuator control, achieving stable inter-process communication and timing precision across the system.
Proof of Concept Demonstration: Conducted a full autonomous cleaning demo where Robotrash detected a piece of litter, navigated to it, picked it up, and disposed of it, validating the feasibility of autonomous indoor cleaning robots for office environments.
Team Collaboration and Cross-Disciplinary Learning: Combined expertise across robotics, embedded systems, AI, and mechanical design, strengthening our ability to work in a multidisciplinary team to bring a complex concept to life.
What we learned
We gained deep, practical experience in the complexity of integrating different operating systems and communication protocols in a single robot. We also learned that in mobile robotics, the low-level tasks (like motor control and precise odometry) are just as critical as the high-level AI tasks (like CV and path planning). The iterative, phased roadmap (Mobility first, then SLAM, then Perception) was crucial for managing project scope.
What's next for Autonomous Office Cleaning Robot (AOCR) : Robotrash
- Enhanced Gripper System: Develop a two-pronged effector system (e.g., standard gripper plus a suction mechanism) to reliably handle a wider variety of litter.
- Optimized CV Performance: Upgrade the high-level processor (e.g., to a Jetson Nano/Orin) to run more optimized CV models for faster object detection and tracking in dynamic office environments.
- Fleet Management: Develop a cloud interface to manage multiple Robotrash units, assign cleaning zones, and generate cleanliness reports for large office complexes.
Built With
- python
- ros2











Log in or sign up for Devpost to join the conversation.