-
-

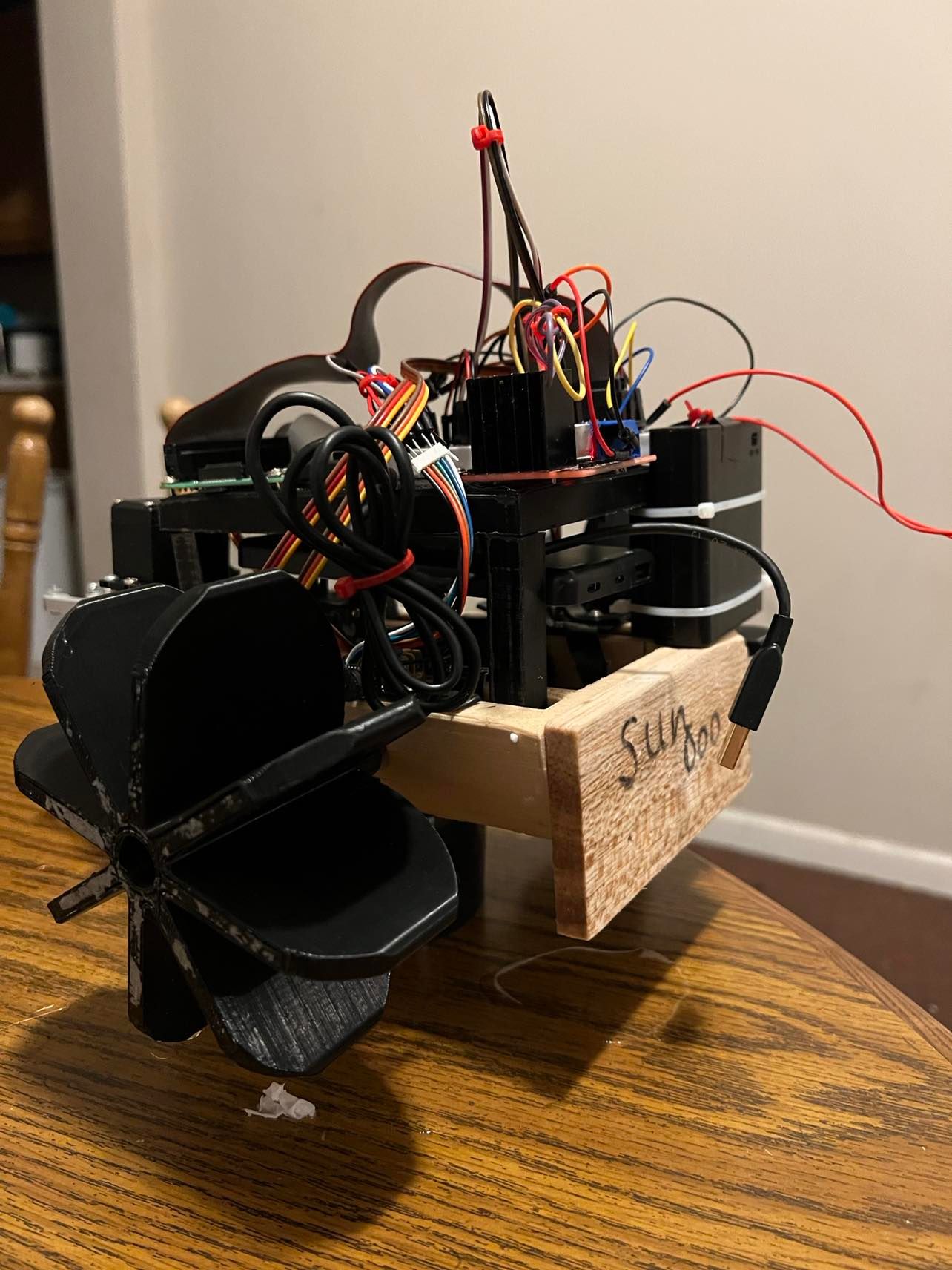
The Sundoo
-

The Sundoo and its maker
-

Detected Soda Can using our Trash Detection Model
-
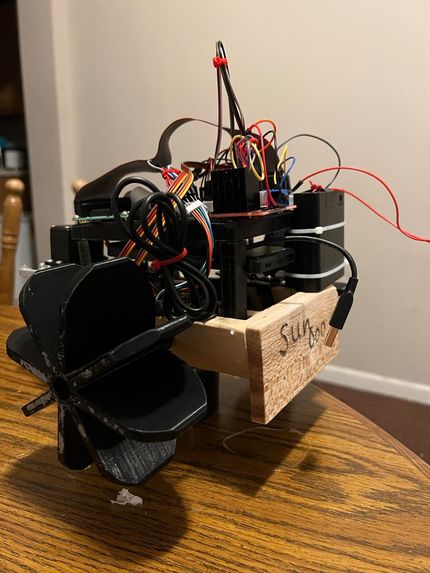
The Sundoo



Inspiration
Every year, an estimated 8 million metric tons of plastic – about the size of nearly 57,000 blue whales - enters our oceans. Ocean pollution causes the death of one million sea birds and over 100,000 marine animals from plastic entanglement and ingestion per year. In addition to the deterioration of marine life, ocean contamination affects our water sources and the air we breathe - it supplies freshwater and nearly all of Earth’s oxygen. The ocean also moderates the climate, influences the weather, and affects human’s health. In other words, the ocean and humans are inextricably intertwined. According to rubicon.com, for every square mile of ocean, there are more than 46,000 pieces of plastic floating in it. Our team is inspired to improve the current polluted state of the ocean by building an autonomous boat (the Sundoo) that can detect, track, and pick up trash.
What it does
The Sundoo detects trash by using computer vision to pinpoint a floating object (or objects) and machine learning model pre-trained with the TACO Trash dataset to classify it as garbage. The coordinates of the object (restricted by the bounding box) are then passed as parameters to lock the object in for tracking purposes. As the boat approaches the tracked object, about 4 inches from the camera, the gripper captures the object and releases it into a trash bag or a designated trash area.
How we built it
We designed the boat body, gears, and paddles using Autodesk Fusion 360 (CAD model) and 3d printed them with the help of Cura. We used Raspberry Pi as the board that controls the motion of the boat based on the trash detection and tracking. The trash detection and tracking part is done using the tensorflow library which outputs the x and y coordinates, width, and height of the trash (its bounding box). Based on this information, the robot goes near to the trash and when it is close enough, the gripper closes and carries it to the nearest disposal site.
Challenges we ran into
We ran into both hardware and software challenges. In hardware, we had problems with tolerances while 3D printing. We also had to do pwm correction for the dc motor we used. It was very challenging to wire all the circuits in an efficient way. We did not have time to print brackets, so we had to mold the thermoplastic using heat gun, which was very tedious and tricky. Regarding the software, even though there were various existing trash detection libraries, some of them have not been maintained over the year, which causes modules/dependencies to conflict; some of them did work, but did not return accurate detections. We also ran into a lot of challenges when integrating all parts of our pipeline.
Accomplishments that we're proud of
• Deployment of image detection model using tensorflow • Opencv object tracking • Integrating hardware and software efficiently • Designing CAD and 3d printing an aerodynamic design of the boat • Distance tracking • Swift collaboration between hardware teams and software teams • ssh into raspberry pi (didn’t know before, now we love it)
What we learned
• Negative effects of ocean pollution • Attaching the solar panel on the roof and making this cleaner robot more environmentally friendly • Tensorflow object detection • 3D printing • Using Raspberry Pi GPIO pins using gpiozero library • AI can be good unlike shown in Hollywood movies
What's next for Autonomous Ocean Cleaner
• Attach a solar panel on the roof to make it more environmentally friendly • Design PID controller to correct the path when waves in the ocean hit the ocean cleaner boat





Log in or sign up for Devpost to join the conversation.