-
-
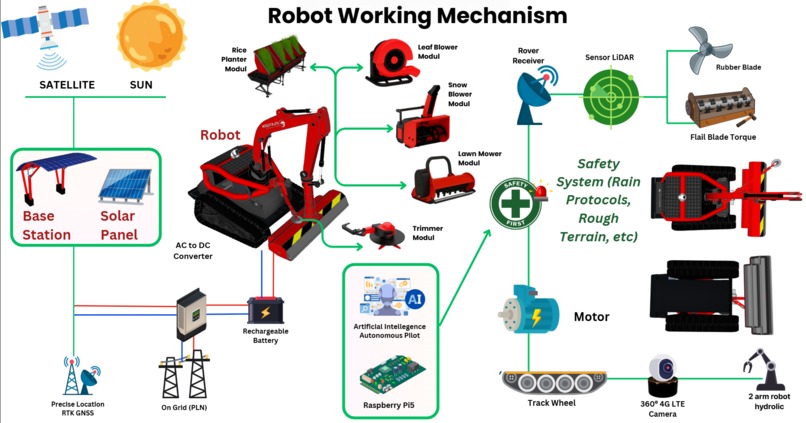
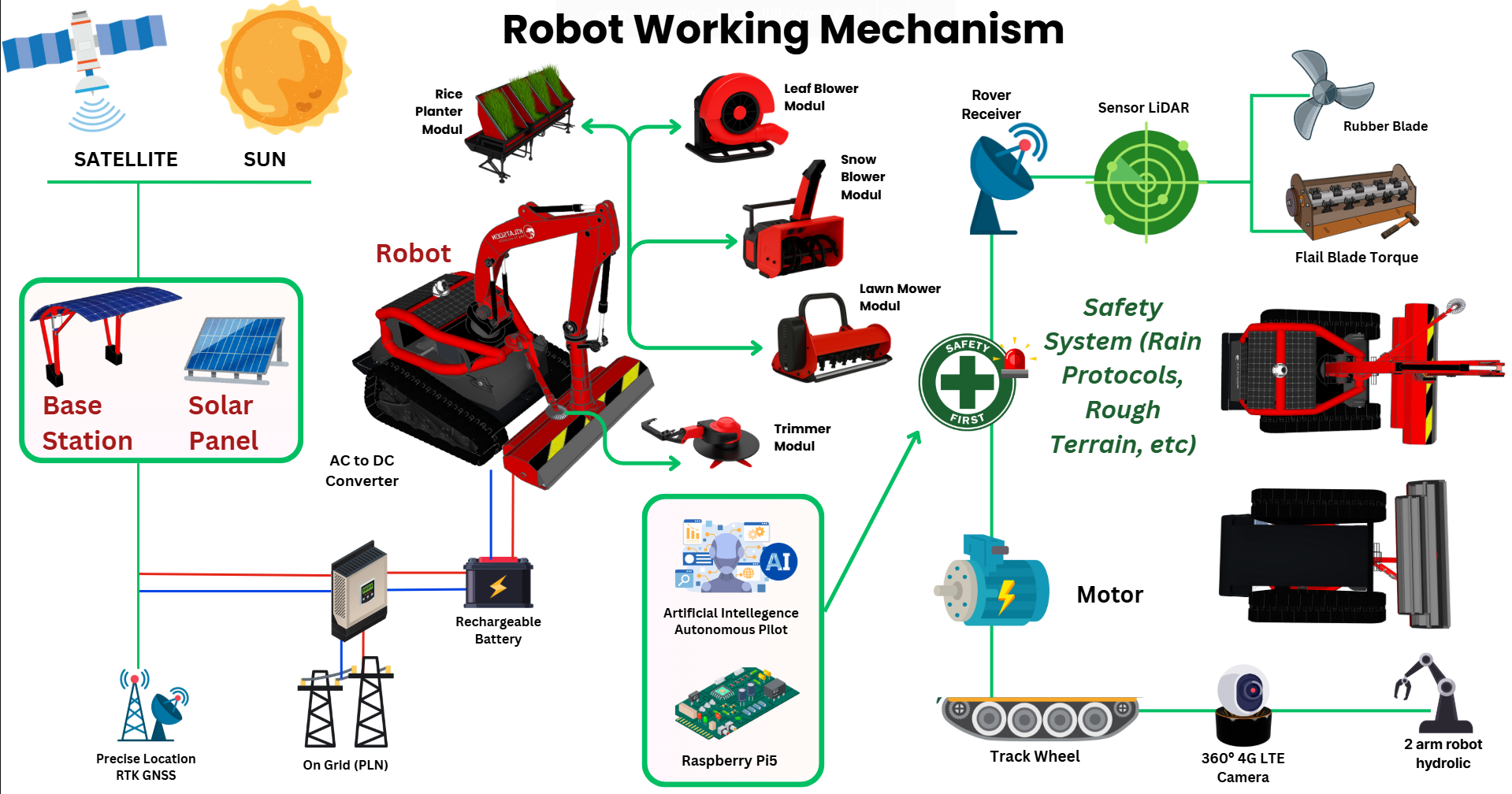
SERGAP is a solar-powered AI robot with modular tools and RTK mapping for autonomous, safe, and precise land maintenance
Inspiration
We were inspired by real-life problems faced by landscaping workers, farmers, and sanitation officers including noise pollution, fuel costs, and physical exhaustion from traditional lawn mowing equipment. We also saw a significant opportunity to create an AI-based modular agricultural robot that is accessible, eco-friendly, and efficient.
This is how SERGAP was born: a smart autonomous modular mower that adapts to multiple use cases, beyond just cutting grass.
What it does
SERGAP is an AI-powered autonomous robot that:
- Cuts grass autonomously with obstacle detection
- Switches functionality using modular arms (mower, rice planter, leaf/snow blower, etc.)
- Uses RTK GNSS, 360° camera, and AI-based autonomous pilot
- Is fully integrated with a no-code app (MyKilat App) for monitoring and control
- Operates on solar energy for low-emission, quiet, and efficient maintenance
How we built it
- Hardware: Built using brushless motors, a crawler-based chassis, Raspberry Pi 5, and camera sensors
- Modular Mechanism: Designed plug-and-play robotic arms with hydraulic system for multi-functionality
- AI Navigation: Developed obstacle-avoidance system using RTK GPS + LiDAR + 360° camera
- No-Code Stack: Built user interface and automation using Adalo, Node-RED, and Make (Integromat)
Challenges we ran into
- Maintaining centimeter-level precision with RTK GNSS in unpredictable weather
- Ensuring compatibility between hardware components and sensor systems
- Balancing strength and weight in modular arm design
- Making the app and UI user-friendly for non-technical users
Accomplishments that we're proud of
- Completed and tested the remote-controlled prototype (SIGAP) on various terrains
- Initiated the full autonomous version (SERGAP) with modular architecture
- Selected in multiple national innovation programs and startup grants
- Built a working prototype capable of mowing up to 1.8 hectares per hour with 360° monitoring
What we learned
- Deep understanding of integrating no-code tools into hardware-based products
- Importance of user research and fast prototyping in hardware innovation
- How AI + robotics can improve inclusivity, sustainability, and public service efficiency
What's next for AUTONOMOUS MODULAR ROBOT MOWER
- Enhance the AI navigation algorithm with real-time learning
- Finalize and test multiple modular arms (e.g., rice planter, leaf blower)
- Deploy pilot units to campuses, public parks, and plantations
- Launch cloud-based dashboard for analytics, usage reports, and remote monitoring
- Seek government partnerships and green-tech certifications
Built With
- camera-360
- hydraulic-arm
- lidar
- mapbox
- motor
- node-red
- openweather
- python
- raspberry-pi
- solar-panel

Log in or sign up for Devpost to join the conversation.