-
-

in flight
-
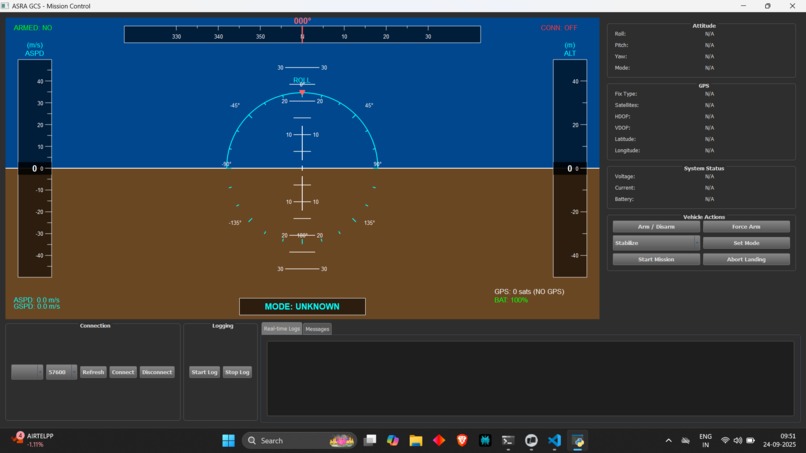
desktop application (ground control station)
-

scout drone



Project Story: Autonomous Drone for Human Scouting and Payload Delivery
Inspiration
In disaster scenarios such as floods, earthquakes, and landslides, the first few minutes are critical. Traditional rescue operations are often slowed by unsafe terrain, limited visibility, and incomplete situational awareness. This project was motivated by the need to accelerate victim discovery and aid delivery without exposing rescuers to additional risk.
By leveraging advances in artificial intelligence, autonomous navigation, and swarm robotics, this system aims to provide a rapid, scalable, and reliable aerial response during emergencies.
What it does
The system is an AI-powered autonomous drone framework designed for human scouting and payload delivery. It:
- Autonomously scans large and hazardous regions
- Detects humans in real time using onboard computer vision
- Computes and transmits accurate GPS coordinates of detected individuals
- Delivers essential payloads such as medical kits, food, or communication devices
- Operates using multi-drone swarm coordination to minimize search time
- Provides duplex telemetry for live mission feedback
The architecture supports two operational modes:
- Hybrid Mode (Implemented): A single drone performs both scouting and payload delivery.
- Distributed Mode: Dedicated scout drones detect and localize humans, while separate delivery drones autonomously navigate to the reported coordinates.
How it was built
The system was built with a modular and platform-agnostic design:
- Onboard Computation: Single-board computer running AI inference and mission logic
- Flight Controller Interface: Handles stabilization, navigation, and safety failsafes
- Computer Vision Module: YOLO-based human detection optimized for embedded hardware
- Autonomous Navigation: GPS-driven mission planning with RTL and geofence logic
- Swarm Coordination Layer: Drones dynamically divide scanning regions and share detections
- Communication System: Two-way radio telemetry without reliance on cellular networks
- Payload Delivery Mechanism: Controlled release system for precise deployment
The framework is airframe-independent and can be applied to:
- Multirotors (quadcopters, hexacopters)
- Fixed-wing UAVs
- Hybrid VTOL platforms
Challenges I ran into
- Running real-time vision models on resource-constrained hardware
- Maintaining flight stability while performing continuous AI inference
- Coordinating multiple drones without redundant area coverage
- Managing GPS noise and localization uncertainty
- Designing safe autonomy with manual override and failsafe behavior
Balancing autonomy, performance, and operational safety was the primary challenge.
Accomplishments that I am proud of
- Successful onboard real-time human detection
- Fully autonomous scouting and payload delivery workflow
- Completed multi-drone swarm coordination for area coverage
- Hybrid and distributed mission architectures validated
- A scalable, modular design adaptable to multiple drone platforms
What I learned
This project provided insights into:
- Embedded deployment and optimization of deep-learning models
- Real-world limitations of GPS, sensors, and communication links
- The importance of synchronization between perception, planning, and control
- Designing autonomous systems with safety and redundancy as first principles
It reinforced the interdisciplinary nature of autonomous aerial systems, spanning AI, robotics, embedded systems, and control engineering.
Performance Metrics (Conceptual)
Swarm-based area coverage efficiency improves with multiple drones.
If total area is (A) and (n) drones divide the region evenly, coverage time can be approximated as:
[ T \approx \frac{A}{n \cdot v \cdot w} ]
where:
- (v) = average drone velocity
- (w) = effective sensor coverage width
Swarm efficiency gain can be expressed as:
[ \eta = \frac{T_{\text{single}}}{T_{\text{swarm}}} \approx n ]
indicating near-linear improvement in search time under ideal coordination.
What's next for Autonomous Drone for Human Scouting and Payload Delivery
Future work will focus on:
- Developing in-house flight controllers for deeper autonomy
- Improving localization using RTK GPS and sensor fusion
- Advanced obstacle avoidance and terrain-aware navigation
- Adaptive mission planning using learning-based approaches
- Enhanced ground control software with analytics and mission replay
The long-term objective is to create a deployable, scalable autonomous aerial response system capable of operating reliably across diverse disaster environments and airframe types.
Built With
- artificial-intelligence-(ai)
- autonomous-drones
- c
- c++
- computer-vision
- flight-controllers
- gps-navigation
- human-detection
- iot
- mavlink
- payload-delivery-systems
- python
- radio-telemetry(operating-without-mobile-networks(4g/5g))
- raspberry-pi
- swarm-robotics
- yolo

Log in or sign up for Devpost to join the conversation.