-
-

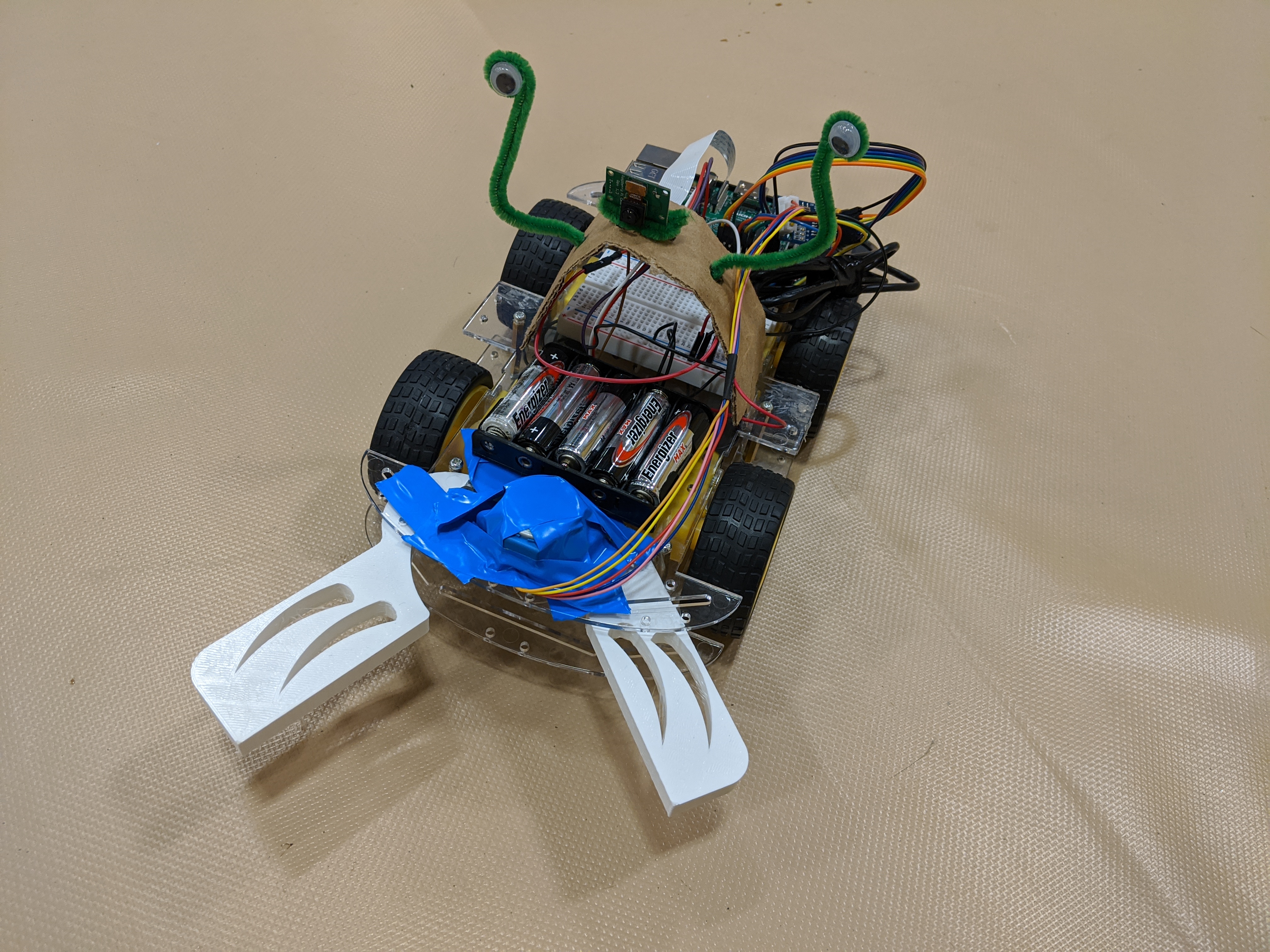
BARABRA the beach cleaning robot
-
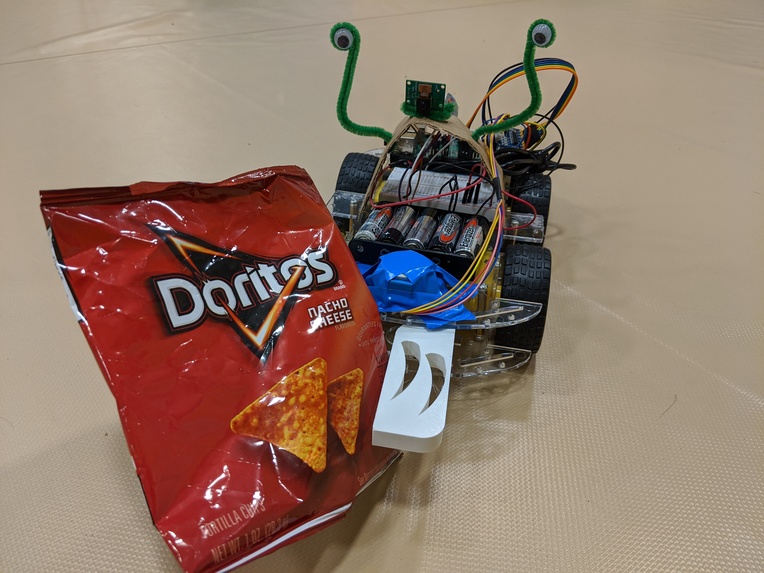
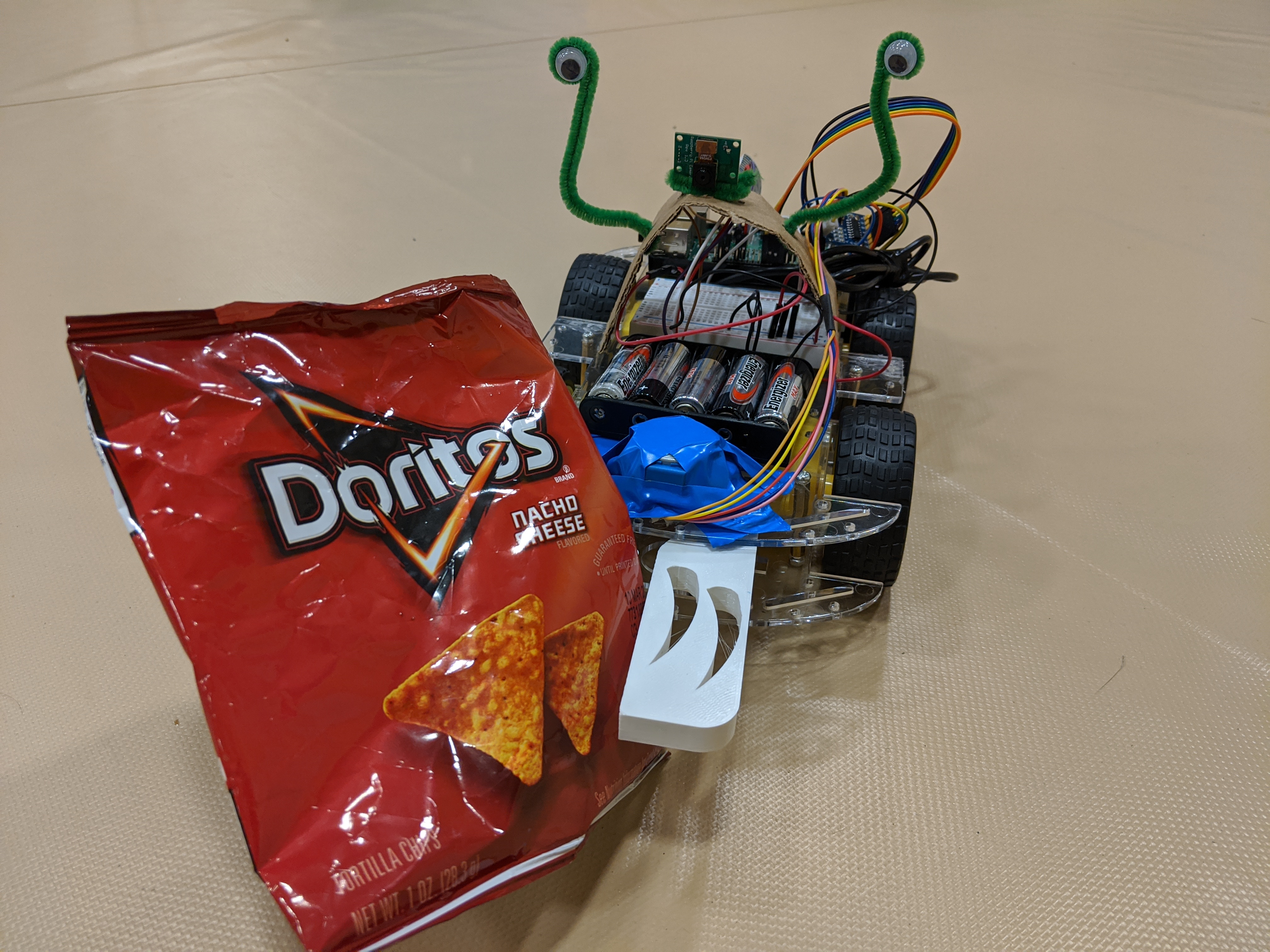
BARABRA with a piece of trash she picked up
-

BARABRA and the WacPac
-
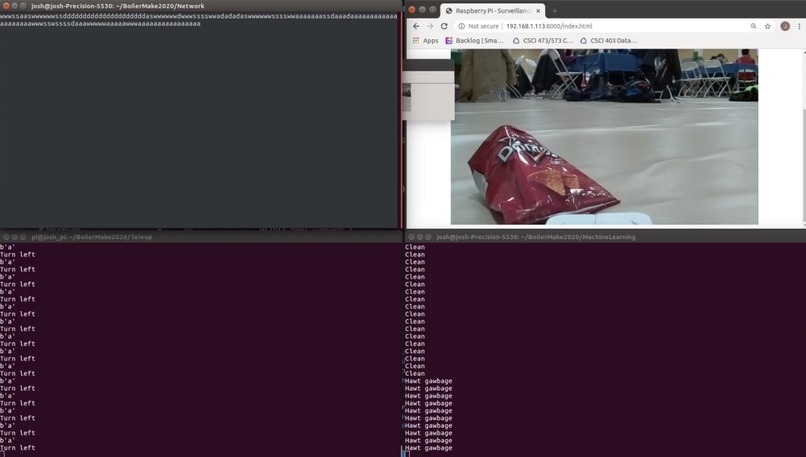
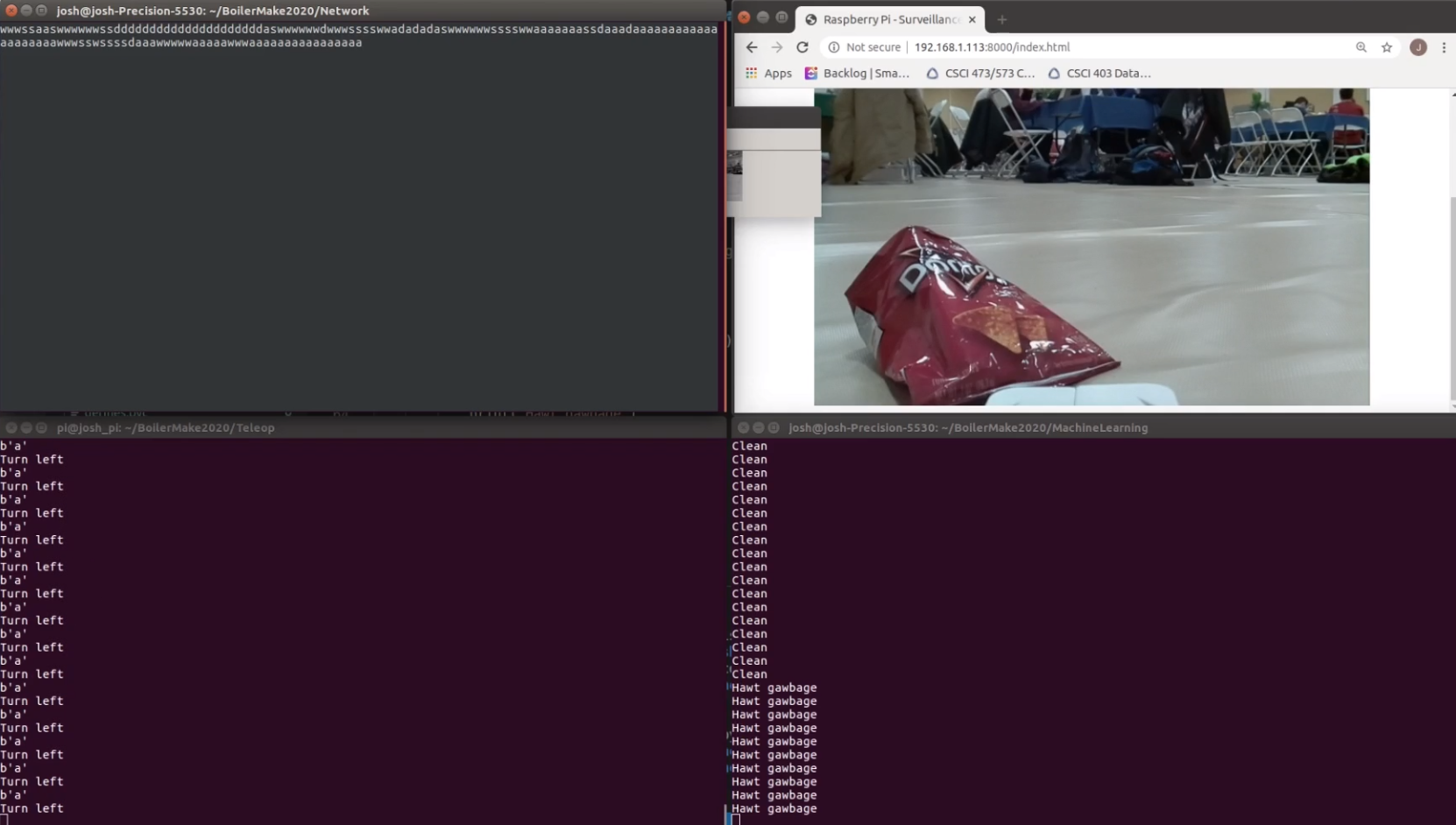
The teleoperation base station view
-
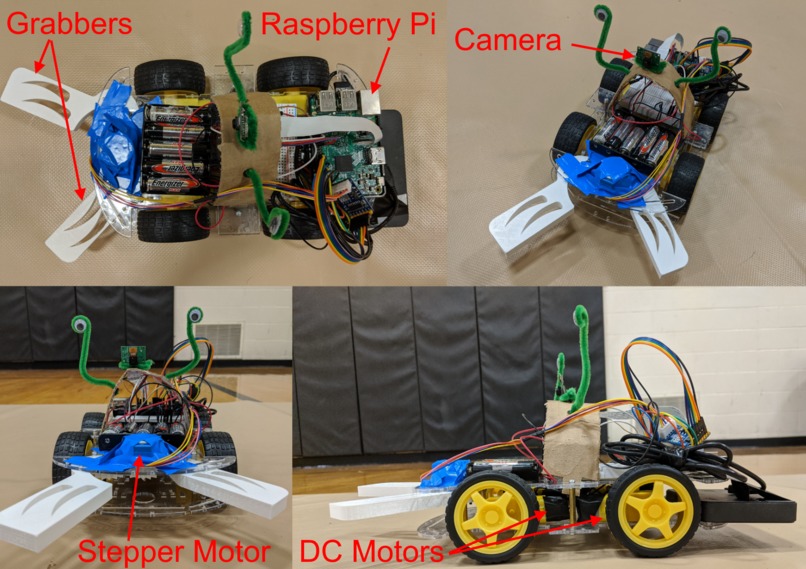
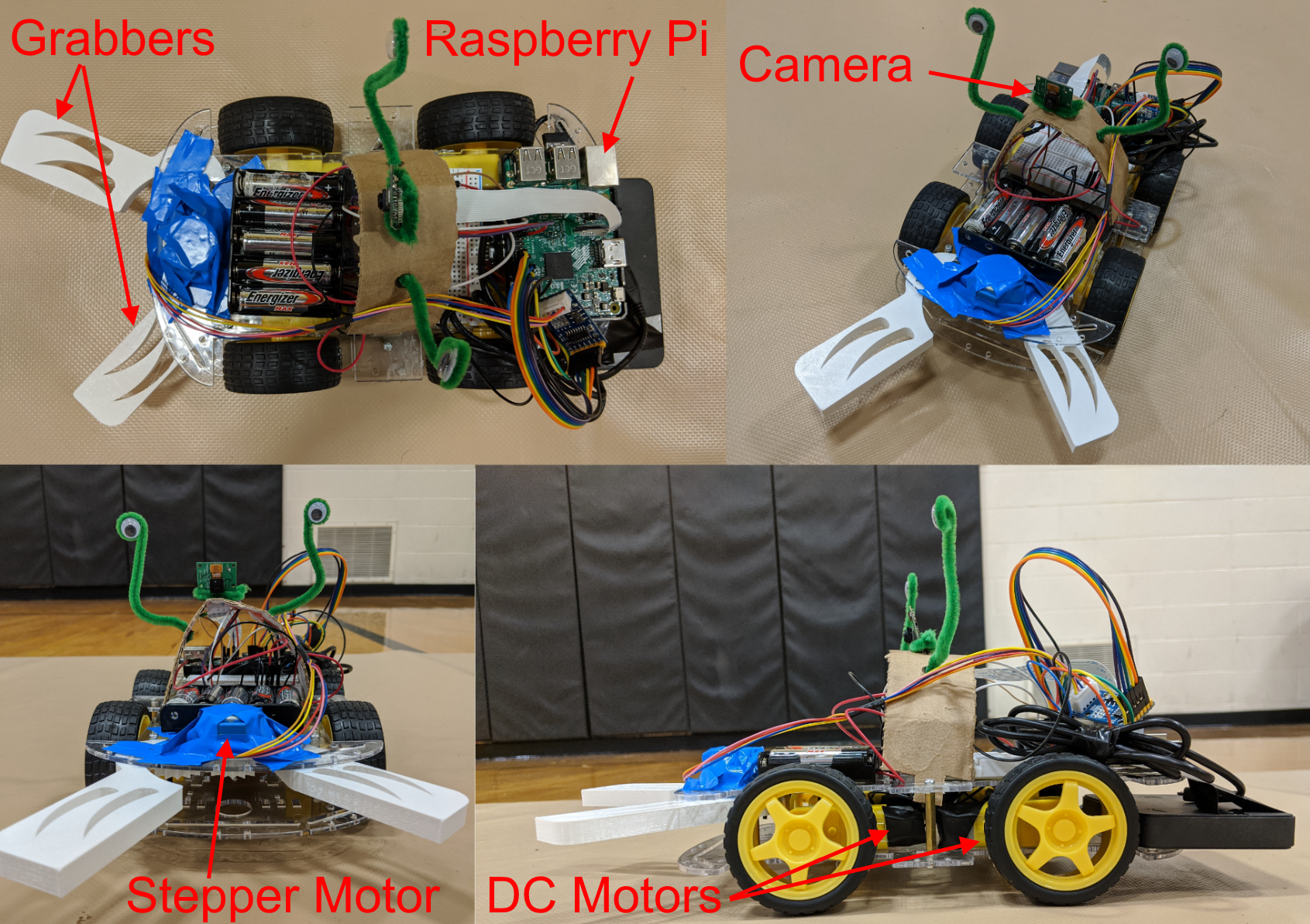
Labeled 3 view pictures of BARABRA
-
BARABRA knows all trash

Inspiration
The growing pollution problem that is facing our generation has become nearly irreconcilable. Each day, 60 million plastic bottles end up in landfills and incinerators [1]. The Great Pacific Garbage Patch has swelled to three times the size of France [2]. Plastic has been found in more than 60% of all seabirds, and 100% of sea turtle species [3]. Every year 8 million metric tons of plastic enter the ocean, adding to the already circulating 150 million tons of plastic. This problem is not only in the raw mass of plastic. As these dangerous plastics slowly decompose, they turn into much smaller components known as microplastics, which can also be present in consumer products such as cosmetics and clothing [4].
As the amount of plastics in the world's waterways increases, so does the amount of plastic that washes up on beaches. These washed up plastics can either re-enter the ocean or remain on the beach and impact the local ecosystem, such as in the example of seabirds and sea turtles with beach-centric breeding grounds. Because most beach cleanup projects are volunteer efforts and concentrated on only the most populated beaches, there is a gap in the current strategies of beach maintenance. Our mission is to develop an autonomous system which removes the plastics that are littered or wash up on beaches so that they can't have any more negative impacts on the ecosystem, or degrade further into microplastics.
What it does
The developed system is a combination of three main components. First, computer vision integration with DC motors to autonomously patrol and identify garbage that will notify a remote operator to teleoperate the car towards the garbage. Second a neural network machine-learning training set acquired for classification of objects between garbage and non-garbage, third,and a claw mechanism for grasping the identified garbage for sorting and disposal.
The autonomous vehicle is driven via Python code that runs simultaneously with the machine learning recognition algorithm. The neural network was trained with various pieces of trash on the ground as well as various backgrounds so that it can correctly detect in a wide range of scenarios. When the machine learning algorithm recognizes trash, it notifies a standby operator so that they can direct the car towards the trash and use the grabbers to pick it up.
How we built it
We started the mechanical build with assembling the vehicle. Using a breadboard and raspberry pi, we pulled together the DC motors and a AA battery pack via pulse width modulation (PWM) outputs for the motors to achieve variable mobility. Then, the main focus was on gathering data to train the neural network with. This was done by taking videos from the on-board camera and categorizing frames from these videos as "garbage" or "clean." While the footage was being collected for training the neural network, the grabbers for the garbage collecting were designed in Solidworks and 3D printed. These were made with a gear system and a slot allowing them to be controlled with a stepper motor. The stepper motor was also connected to the raspberry pi and coded to be able to be opened and closed by the teleoperator. The gear system implemented in this design allowed only one stepper motor to be used in the mechanism.
Challenges we ran into
One challenge that the group ran into included connecting the raspberry pi wirelessly to a laptop over the provided network. The team had to get a router to make a wired connection with ethernet. Even with this fix, the group still struggled to maintain a consistent, reliable connection because of how connection intensive the project was given that the vehicle was transmitting video back to the laptop. Additionally, because the entire system had to be working in order to collect training data for the neural network, there was not enough time left to really dive into fine tuning the neural network's capabilities.
Accomplishments that we're proud of
Some of the aspects of this project that we are proud of include having two team members learn how to use Python on the fly to prototype with the system. Having all four team members able to write, edit and execute code was essential to being able to divide and conquer with the various aspects of this project. Another thing we are proud of is having a working prototype with all of the major components functioning that we envisioned having at the outset of the project. Even with a crunched time frame and limited sleep, we showed great resolve with effective time-constrained problem solving. Finally, we were proud of how seamlessly we were able to integrate the mechanical design of the vehicle components and layout along with the software through the raspberry pi and machine learning.
What we learned
This project lent a great learning opportunity for all of the group members. We learned a lot about neural networks and how sensitive the beginning stages of their training is for getting a desirable end product. We also learned about the sensitivity of connection in high throughput data transfer systems. This project also gave us a chance to appreciate the practical utility of the rapid prototyping opportunities that CAD and 3D printing offer for mechanical design.
What's next for Autonomous Beach Cleanup
The breadth of scope for this application leads to many possible next steps for the project. For example, because this is going to be used on beaches, the vehicle will need to be equipped with appropriate wheels and tires to effectively navigate the terrain. We would also like to incorporate further machine learning so that when garbage is detected the vehicle can navigate itself to the garbage and autonomously pick it up. Another consideration is that the vehicle should only chase a piece of garbage for a set amount of time so that it doesn't get stuck chasing a bag in the wind. The vehicle should also have hard boundaries that it cannot exceed when traveling the beach. This will prevent it from going in the water or a nearby road. The vehicle could incorporate a system that detects proximity to water in order to avoid changing tide levels or storm water levels. Finally, the vehicle should have an onboard storing system so that it can stay dispatched for extended periods of time. Within this storing system, a sorting mechanism could be implemented such that it separates out recyclables from waste.
Sources:
Built With
- 3dprinting
- autonomy
- dc-motor
- ip-camera
- machine-learning
- network
- neural-network
- object-recognition
- opencv
- python
- raspberry-pi
- robotics
- socket
- stepper-motor
- teleoperation
- tensorflow





Log in or sign up for Devpost to join the conversation.