-

The Team
-
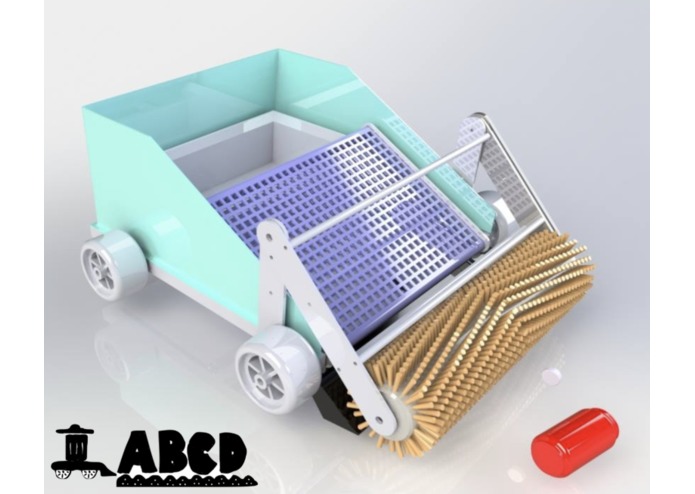
Very early CAD of our design. It has changed tremendously and we'll be providing an update soon!


What is it?
The Autonomous Beach Cleaning Device, or ABCD, is our Fourth Year Design Project. The program I am in, Mechatronics Engineering at the University of Waterloo, organizes a capstone 8 month long project to showcase our skills and build something meaningful. Me and three friends from the same program decided to tackle the problem of garbage in our oceans and beaches by building a robot that will navigate a sand beach to pickup garbage and avoid obstacles, all without the assistance of an operator.
How does it work?
The robot uses a mobile robotics platform as a powertrain and base chassis. A roller brush and conveyor work in conjunction to pick up and transport garbage to a waste storage system onboard the robot. The ABCD uses a camera and ultrasonic sensor to provide input for its path planning algorithm. To learn more about the report, please see the detailed Final Design Report.
Where can I learn more about it?
To learn more about this project, check out our Final Design Presentation, or our Final Design Report. You may also simply reach out to me at mkrutiy@edu.uwaterloo.ca, I'd love to share more about this passion project.
Where can I support this project?
As you can imagine, this project is fairly expensive to develop and build. The projected cost of this project is about 5,600 CAD. The University of Waterloo helps subsidize the cost of this required project by providing $600. Unfortunately that is not enough, so we are looking to partner with companies to sponsor our team. If you are interested in sponsoring our team, please see the sponsorship package. We would also be incredibly appreciative of any donations made to our gofundme page.
Built With
- arduino-uno
- autonomous
- clearpath-robotics
- electromechanical
- nvidia-jetson


Log in or sign up for Devpost to join the conversation.