Inspiration
My inspiration is seeing how Tesla and Elon Musk are ushering in a new generation of electric, autonomous cars. After proposing my idea to the rest of the team and my professor, my idea was approved!
You can read my article about this project here
What it does
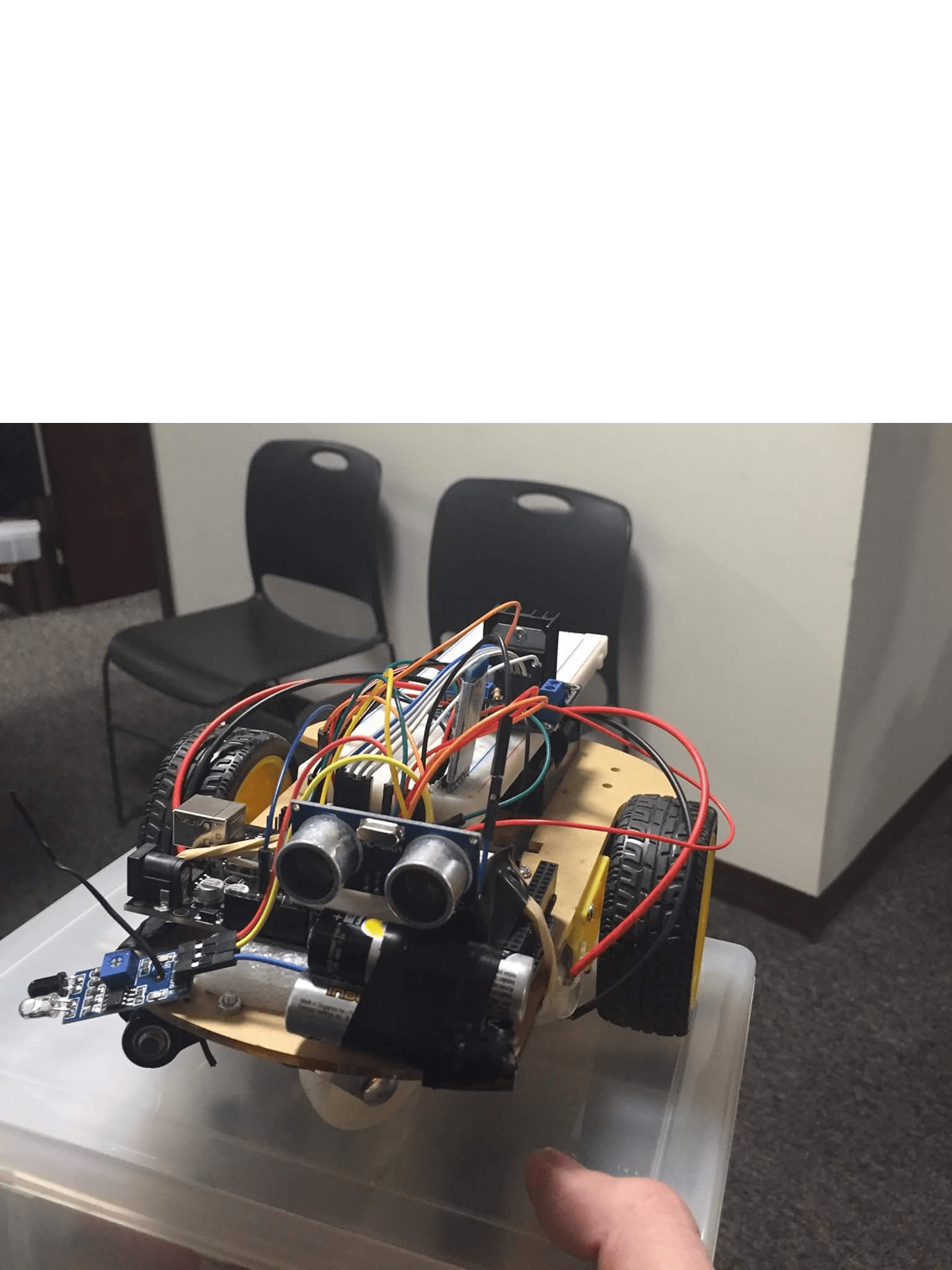
Navigates a basic course by detecting objects using both sonar and IR sensors. After determining whether there is an object in the path that the car is traveling, the car "looks" to its left and right and goes that direction. We also included an HC-06 Bluetooth module that read in ASCII characters and made the car remote controlled. For example, send the char 'F' would move the car forward continuously until another char was sent over like 'B' for break.
How We built it
Parts List:
- Arduino 2560
- Jumper Cables
- HC-05
- IR & Sonar Distance Sensors
- Bread Board (This was before I knew how to solder)
- Motor & Wheels
- Motor Shield
Challenges We ran into
- It was overwhelming at first because no one in my group knew anything about Arduino's or electronics so we spent a good chunk of our limited time just learning everything we could about them.
- We researched out parts extensively to make sure everything would work together harmoniously before purchasing everything
- The HC-06 did not want to read in ASCII chars for the longest time
Accomplishments that We are proud of
We got the car working, on time which was wonderful. We were close to the wire but we got everything working. My understanding of electronics and IoT components is now pretty solid.
What We learned
A ton! I was able to brush up on Android development while simultaneously learning about something completely new: Arduino's.
What's next for Autonomous Arduino RC Car
I would like to make a 2.0 version that incorporates the Google Maps API and include OpenCV to identify upcoming obstacles. Who knows, version 2.0 might give Elon Musk's Tesla Model S a run for its money!

Log in or sign up for Devpost to join the conversation.