
Overview
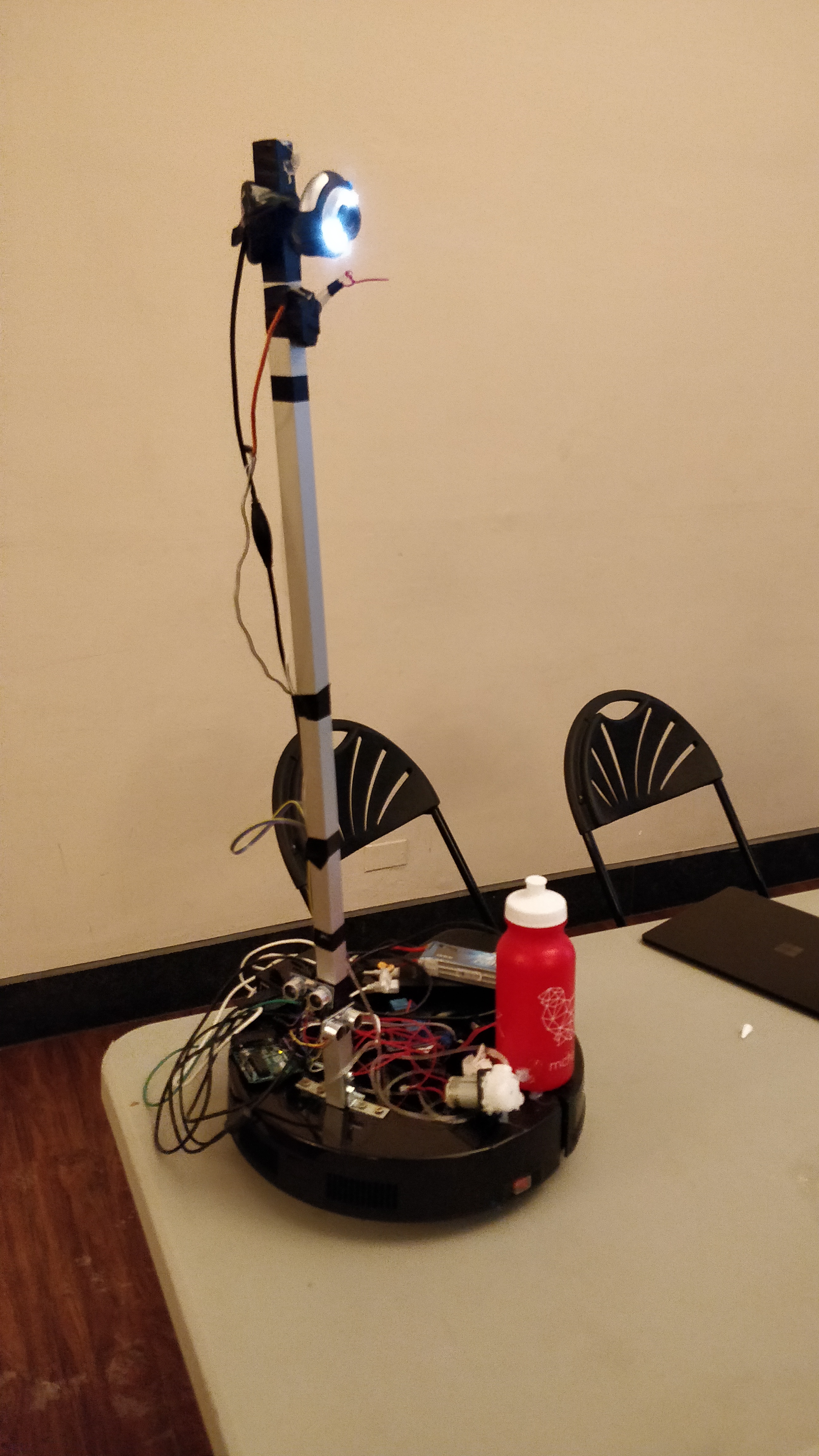
AOFS is an automatic sanitization robot that navigates around spaces, detecting doorknobs using a custom trained machine-learning algorithm and sanitizing them using antibacterial agent.
Inspiration
It is known that in hospitals and other public areas, infections spread via our hands. Door handles, in particular, are one such place where germs accumulate. Cleaning such areas is extremely important, but hospitals are often at a short of staff and the sanitization may not be done as often as should be. We therefore wanted to create a robot that would automate this, which both frees up healthcare staff to do more important tasks and ensures that public spaces remain clean.
What it does
AOFS travels along walls in public spaces, monitoring the walls. When a door handle is detected, the robot stops automatically sprays it with antibacterial agent to sanitize it.
How we built it
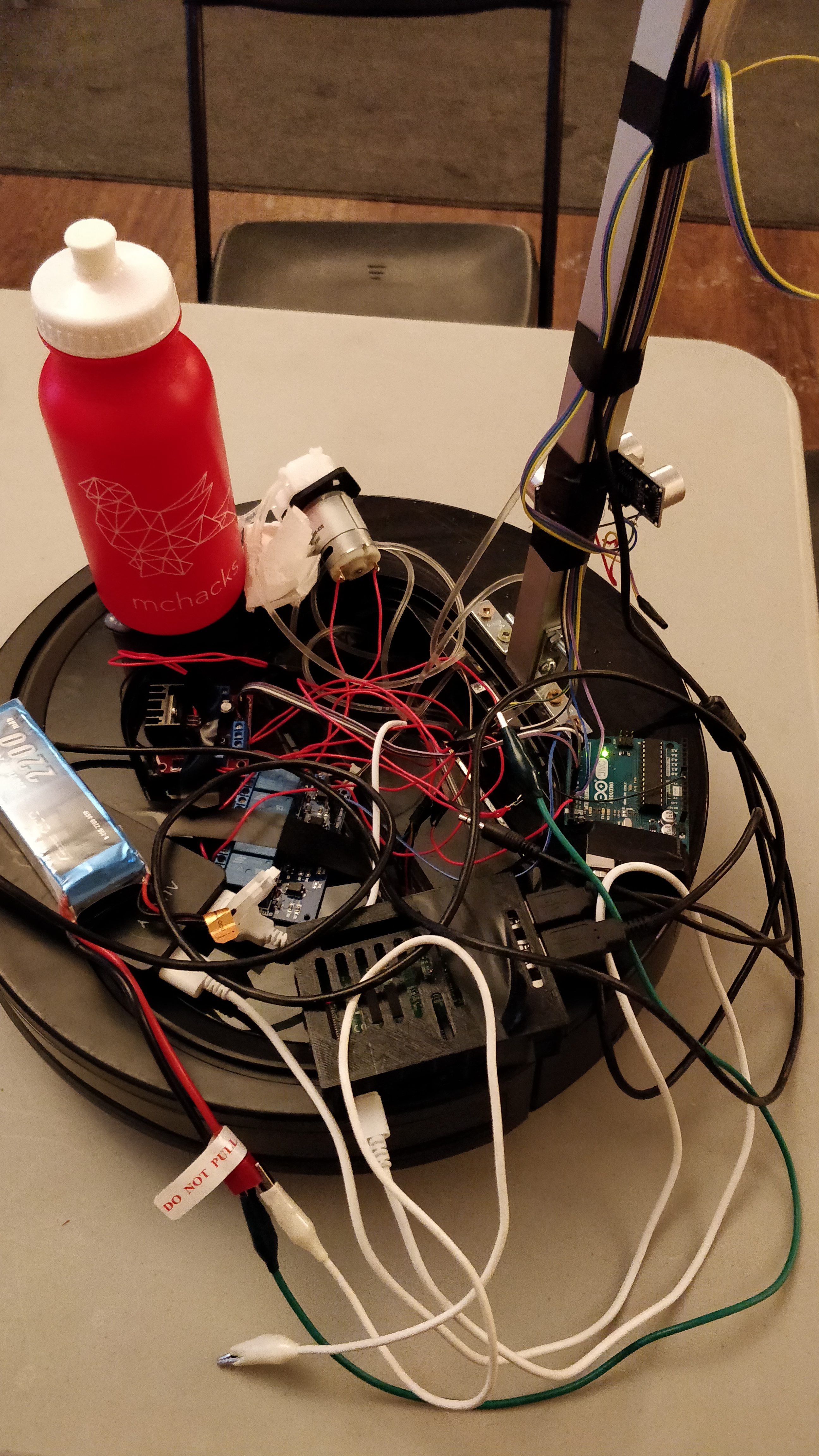
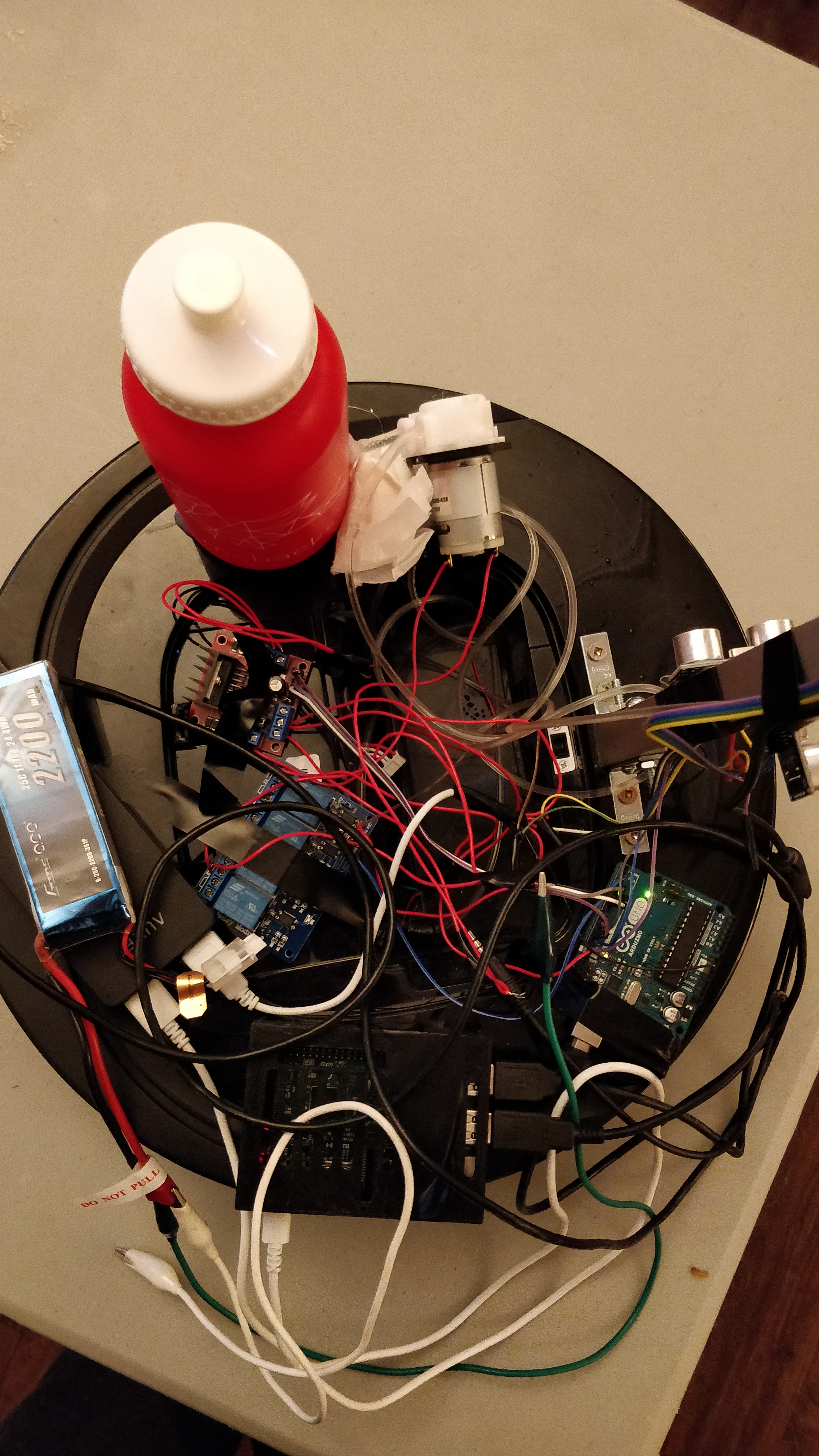
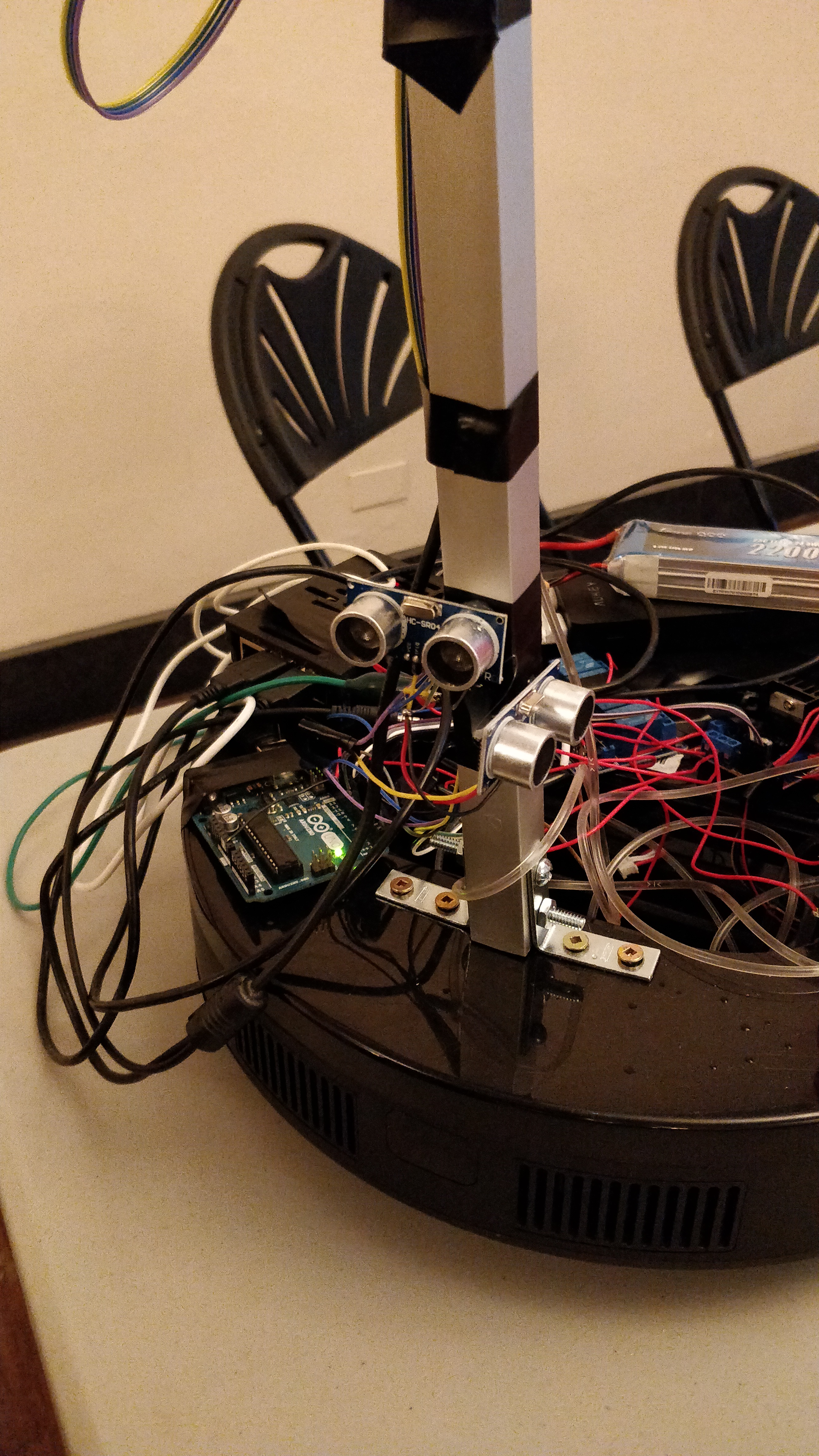
The body of the robot came from a broken roomba. Using two ultrasonic sensors for movement and a mounted web-cam for detection, it navigates along walls and scans for doors. Our doorknob-detecting computer vision algorithm is trained via transfer learning on the YOLO network (one of the state of the art real-time object detection algorithms) using custom collected and labelled data: using the pre-trained weights for the network, we froze all 256 layers except the last three, which we re-trained on our data using a Google Cloud server. The trained algorithm runs on a Qualcomm Dragonboard 410c which then relays information to the arduino.
Challenges we ran into
Gathering and especially labelling our data was definitely the most painstaking part of the project, as all doorknobs in our dataset of over 3000 pictures had to be boxed by hand. Training the network then also took a significant amount of time. Some issues also occured as the serial interface is not native to the qualcomm dragonboard.
Accomplishments that we're proud of
We managed to implement all hardware elements such as pump, nozzle and electrical components, as well as an algorithm that navigated using wall-following. Also, we managed to train an artificial neural network with our own custom made dataset, in less than 24h!
What we learned
Hacking existing hardware for a new purpose, creating a custom dataset and training a machine learning algorithm.
What's next for AOFS
Increasing our training dataset to incorporate more varied images of doorknobs and training the network on more data for a longer period of time. Using computer vision to incorporate mapping of spaces as well as simple detection, in order to navigate more intelligently.
Built With
- arduino
- google-cloud
- keras
- python
- qualcomm
- tensorflow





Log in or sign up for Devpost to join the conversation.