Inspiration
We are big fans of water pong and its variations but nothing kills the mood of an early afternoon hangout like the need to put the cups back in their original positions once a game is over. Any college student will know this struggle. What if there was something that one could place on the table that automatically takes the cups on the side of the table and put them in place? Introducing the AOPS 3000.
What it does
AOPS uses its "state of the art" gripper and four other servos to move around on three axis using delta movement to pick and drop objects off. With programming we can configure the path of the gripper allowing for endless paths and possibilities. We are using these capabilities to facilitate games of water pong.
How we built it
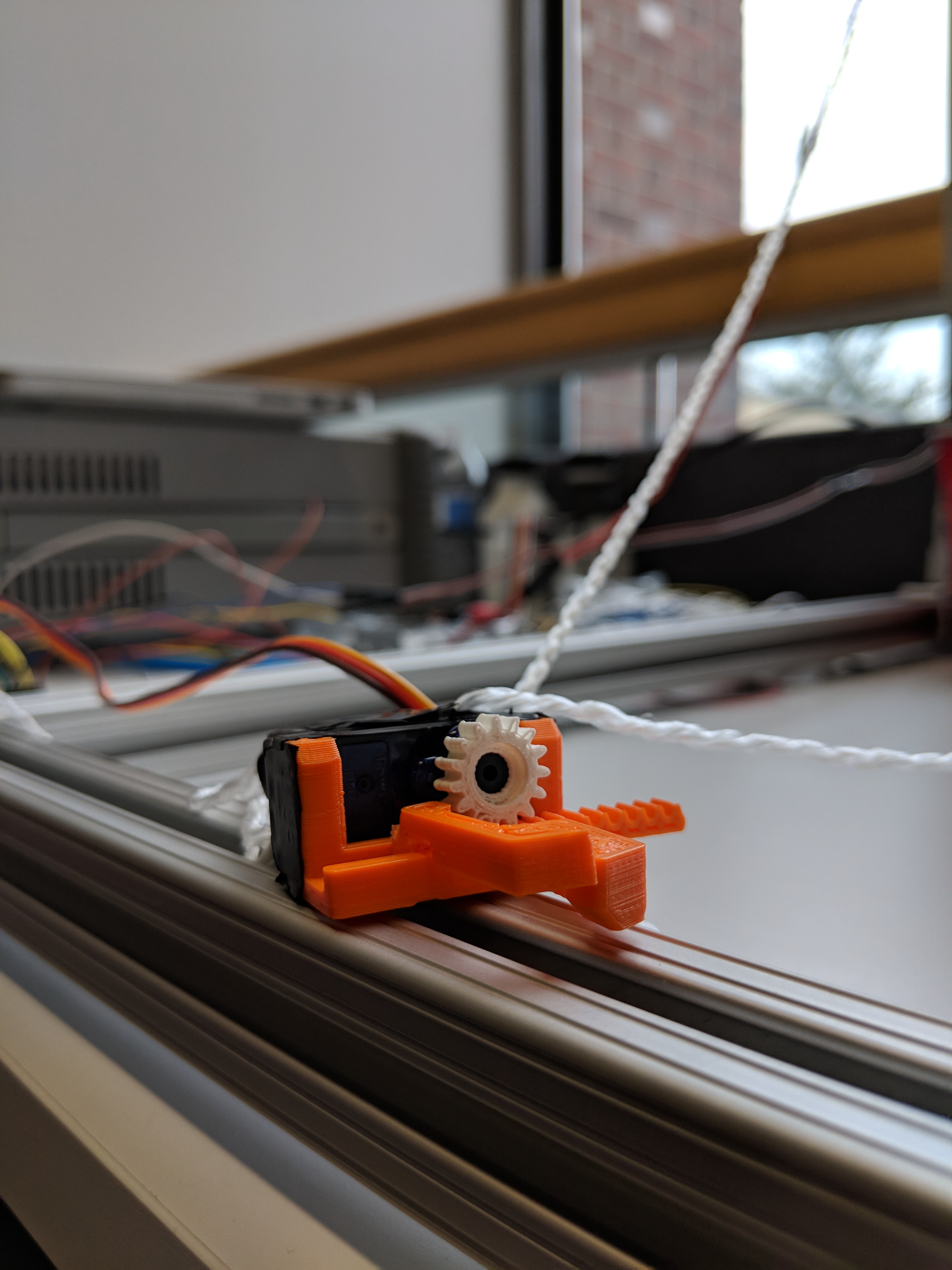
We started off by building the foundation using metal rods that we stuck together. Once the foundation was stable we attached servos on all four of the rods that were pointing up. We then unbraided string which we looped around the servos allowing all of them to pull and to release by turning. Whilst we were setting this up we were 3d printing the parts for the gripper which we then attached on the midpoints of the strings. We programmed the movement in C++ with the arduino that we used.
Challenges we ran into
At first we wanted the movement be Cartesian but due to the requirements and the weight of the material that we are using we found it easier to go for delta movement instead. We also had an issue with the voltage that was provided to the Arduino and the servos being insufficient. Instead we switched to an alternate source of power.
Accomplishments that we're proud of
We're very happy to have able to have been able to achieve so much in such a limited amount of time considering the time that it took for us to find this idea. We are the most proud of being able to figure out the wiring and the 3d modeling for the gripper.
What we learned
Having mostly experience in software, both of us learned a lot about electrical engineering with the circuitry and the servos. I (Julian) also learned a lot more about CAD and 3d printing which I now found really exciting.
What's next for Automated Object Placement System 3000
AOPS 3000 will get an app to plan and test movements so that people without prior programming experience can leverage its capabilities. We will also change the power source to batteries so that AOPS can be more portable.



Log in or sign up for Devpost to join the conversation.