
Inspiration The inspiration behind AutoLid stemmed from the very common issue of the trash not being taken out on time and the smell of that trash becoming worse and worse. Whether you're a college student living in a dorm with a communal trashcan, a parent, or a landlord, you've definitely experienced this problem.
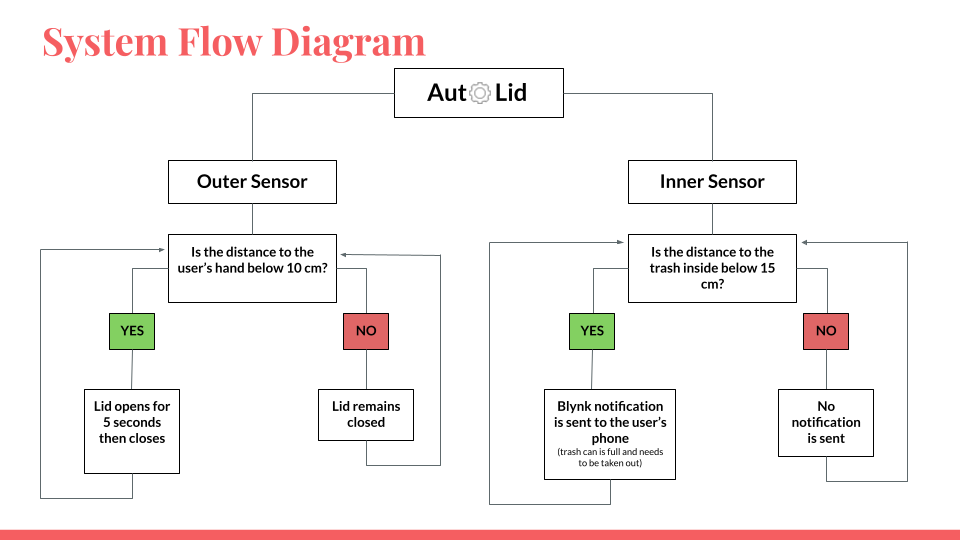
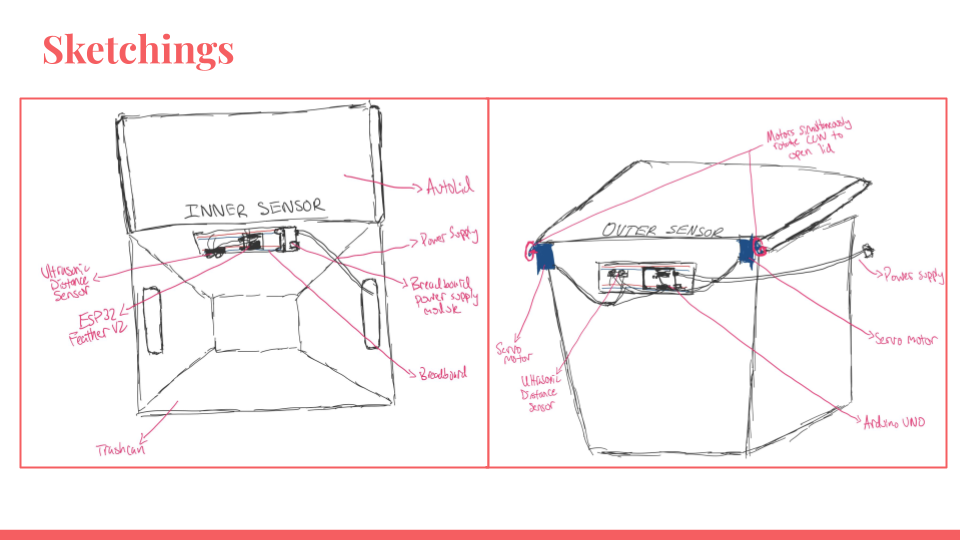
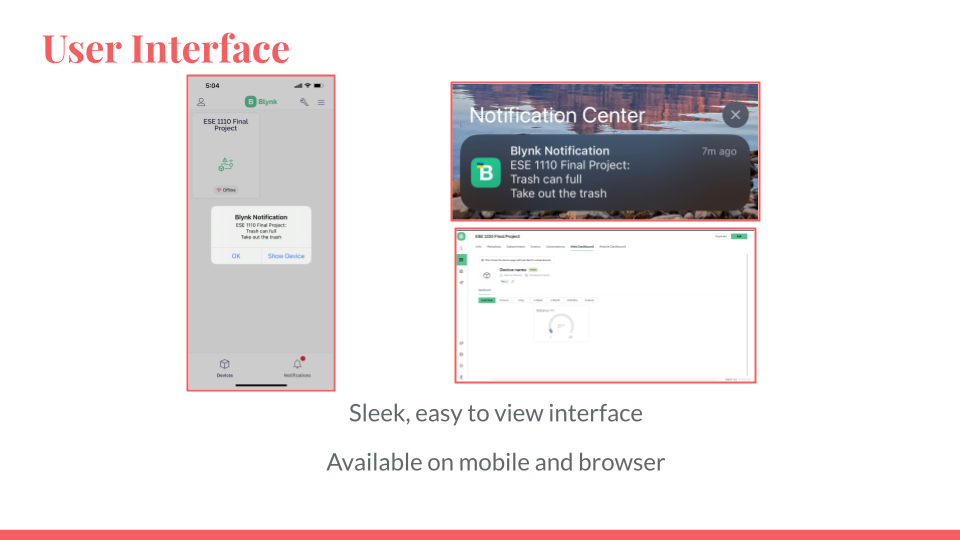
What it does AutoLid has two main functionalities, the first being a sensor that detect you waving or hovering your hand over it to automatically open the lid, all of which is hands free. The second functionality is a sensor on the inside that detects the level of fullness of the trashcan and if it is full, it will automatically send a notification to your phone telling you to empty the trash.
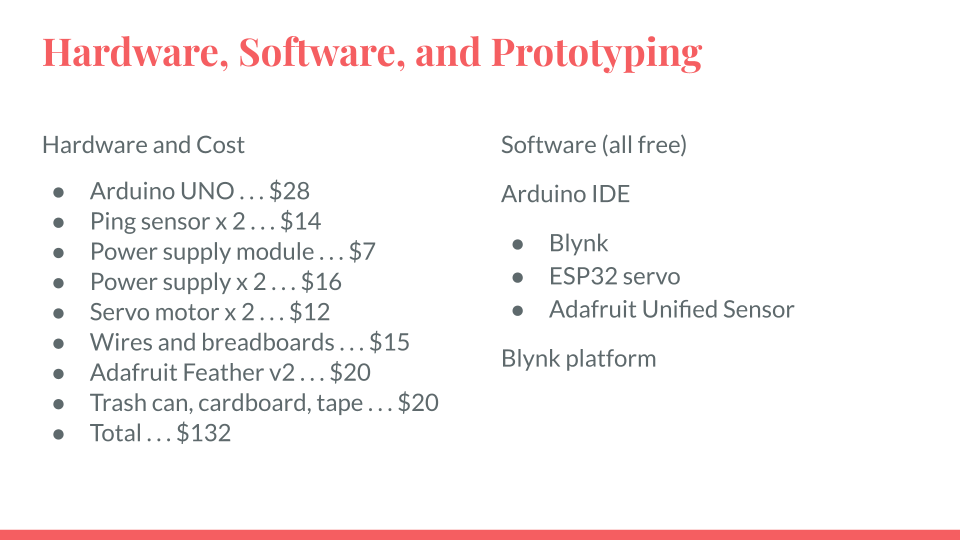
How we built it We built AutoLid with Arduino.
Challenges we ran into We ran into a couple challenges, both on the hardware/mechanical side and the software side. The mechanical challenge we ran into was the mechanism of the lid opening by the servo motor rotation. With some persistence, the opening/closing of our lid was done smoothly. On the software side, we ran into issues with the Adafruit ESP32 FeatherV2 and connecting it to Blynk, but eventually we were able to solve these issues and get the notification function to work.
Accomplishments that we're proud of We are proud that the opening/closing of the lid works and the notification functionality works smoothly as well. We were able to successfully implement the main functions of what we wanted AutoLid to accomplish.
What we learned We learned how to apply Arduino to a design process. We also learned a lot about product design, editing videos, and giving successful presentations.
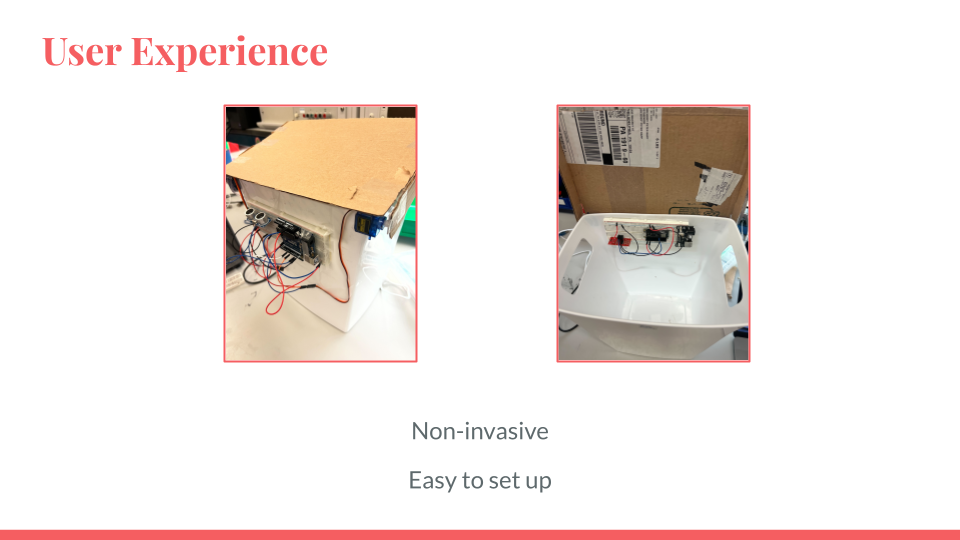
What's next for AutoLid We hope to use sturdier materials for the lid as well as put all the parts of AutoLid in their own compartments to improve durability. We also would like to build a smaller/larger scale version of this initial developmental stage of AutoLid.

Log in or sign up for Devpost to join the conversation.