-
-
Demo Day Title
-

Demo Day slide 1
-

Demo Day slide 2
-
Demo Day slide 3
-

Demo Day slide 4
-

Demo Day slide 5
-

Demo Day slide 6
-

Demo Day slide 7
-

Demo Day slide 8
-

Demo Day slide 9
-

Demo Day Standards
-

Demo Day flow chart












Abstract
AutoGreens seeks to automate the microgreen growing and harvesting process. The project combines software and hardware components to achieve this goal. Microgreens are a class of vegetable greens known for their short growing time of around fourteen days until harvest. These highly nutritious plants, although only around two inches tall upon harvest, can contain up to 40 times higher levels of vital nutrients than their mature counterparts (Xiao, Lester, Luo, & Wang, 2012). Growing plants can be time-consuming and difficult for the untrained hand. Thus, AutoGreens seeks to automate the process by utilizing sensors and cameras to optimize growing conditions and make harvesting decisions with minimal interference from the user. We propose that our device could help increase accessibility to healthy food options (i.e. microgreens), especially in food deserts, and help reduce the current health problems in America.
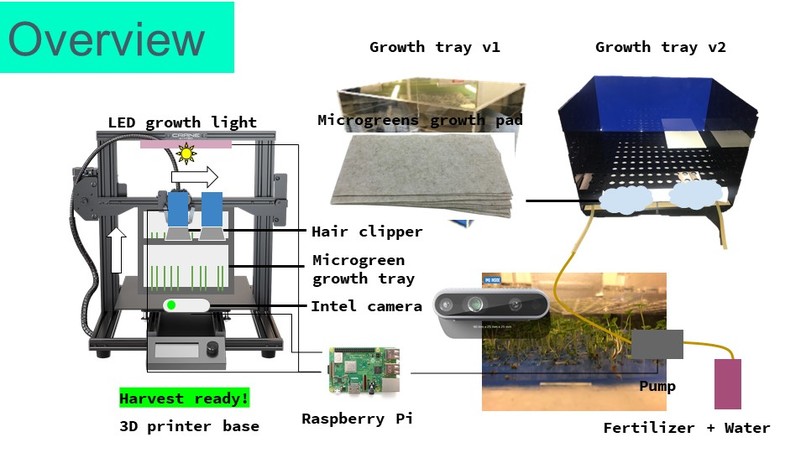
The project can be broken down into hardware and software components. The growing tray design is inspired by a micropipette tip box; each seed grows in elements of the array and grows straight up. This design spaces seeds uniformly across a tray to prevent entanglement while still ensuring a compact space. The seeds grow on and extend roots into a microgreen growing pad into which a drip irrigation system will dispense water, pushed by a pump. A 3D printer frame moves the growing tray up and down, positions the harvesting blade down to an appropriate level for plant harvesting, and moves the harvesting blade around in the tray to cut the plants. We designed the first prototype of the harvesting blade using a DC motor and a laser-cut acrylic blade with blunt edges to avoid safety issues. Later, however, we transitioned to using a hair clipper because we found it to be more effective in cutting the microgreens. An Intel RealSense camera is connected to a Raspberry Pi and is used to determine when the microgreens are ready to be harvested, using an IBM image recognition algorithm. The Raspberry Pi also controls an LED light to provide the microgreens with energy, the pump system powering the auto-irrigation system, and the hair clipper to harvest the microgreens.
Demo Day Presentation
Google Slides link:
https://docs.google.com/presentation/d/1cjSPl1m-JJ34xoRWUIPXjl4DZC-9miZm0_Rf_vCeJMo/edit#slide=id.g6b2987e6c2_0_0
Final Demo Video
YouTube link:
https://youtu.be/25JHhvjGpJc
Final Poster
Google Slides link:
https://docs.google.com/presentation/d/1Vvuyp0limeeOXsSjOlE0dHOj9Z7j8DtenrFzwG4JcYs/edit?usp=sharing
References
Linck L. (2013). Benefits and statistics about eating healthfully detailed. Kansas State University. Retrieved from https://www.k-state.edu/today/announcement/?id=8989
Lufkin, Bryan. (2017). 10 Grand Challenges We'll Face by 2050. BBC Future, BBC. Retrieved from https://www.bbc.com/future/article/20170713-what-will-the-challenges-of-2050-be
Ver Ploeg M, Nulph D, Williams R. (2011). Mapping Food Deserts in the United States. United States Department of Agriculture. Retrieved from https://www.ers.usda.gov/amber-waves/2011/december/data-feature-mapping-food-deserts-in-the-us/
Xiao Z, Lester GE, Luo Y, Wang Q. (2012). Assessment of vitamin and carotenoid concentrations of emerging food products: edible microgreens. J Agric Food Chem, 60(31), 7644-51.
Log in or sign up for Devpost to join the conversation.