-

Logo
-
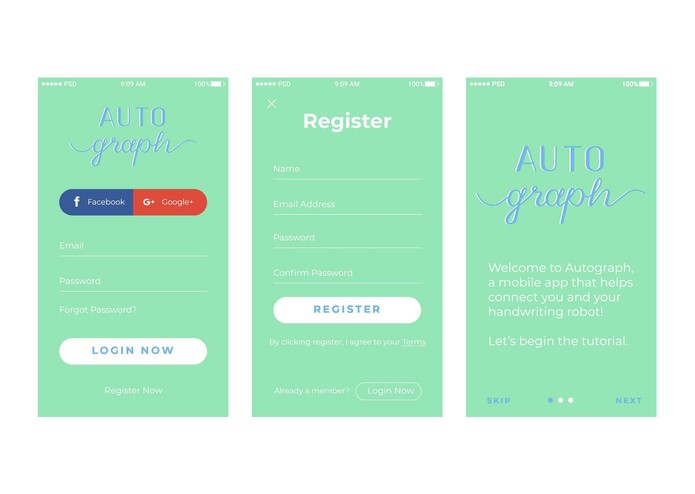
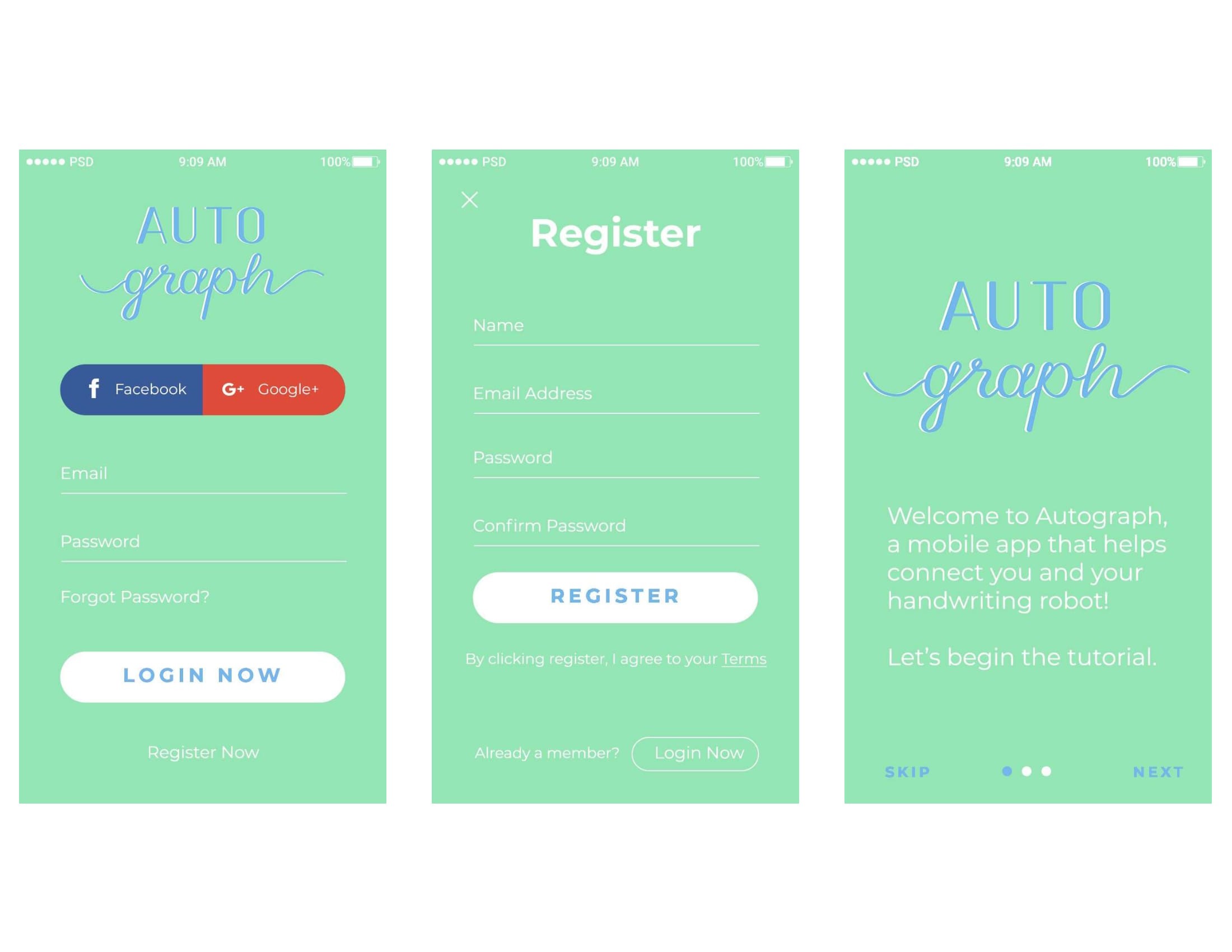
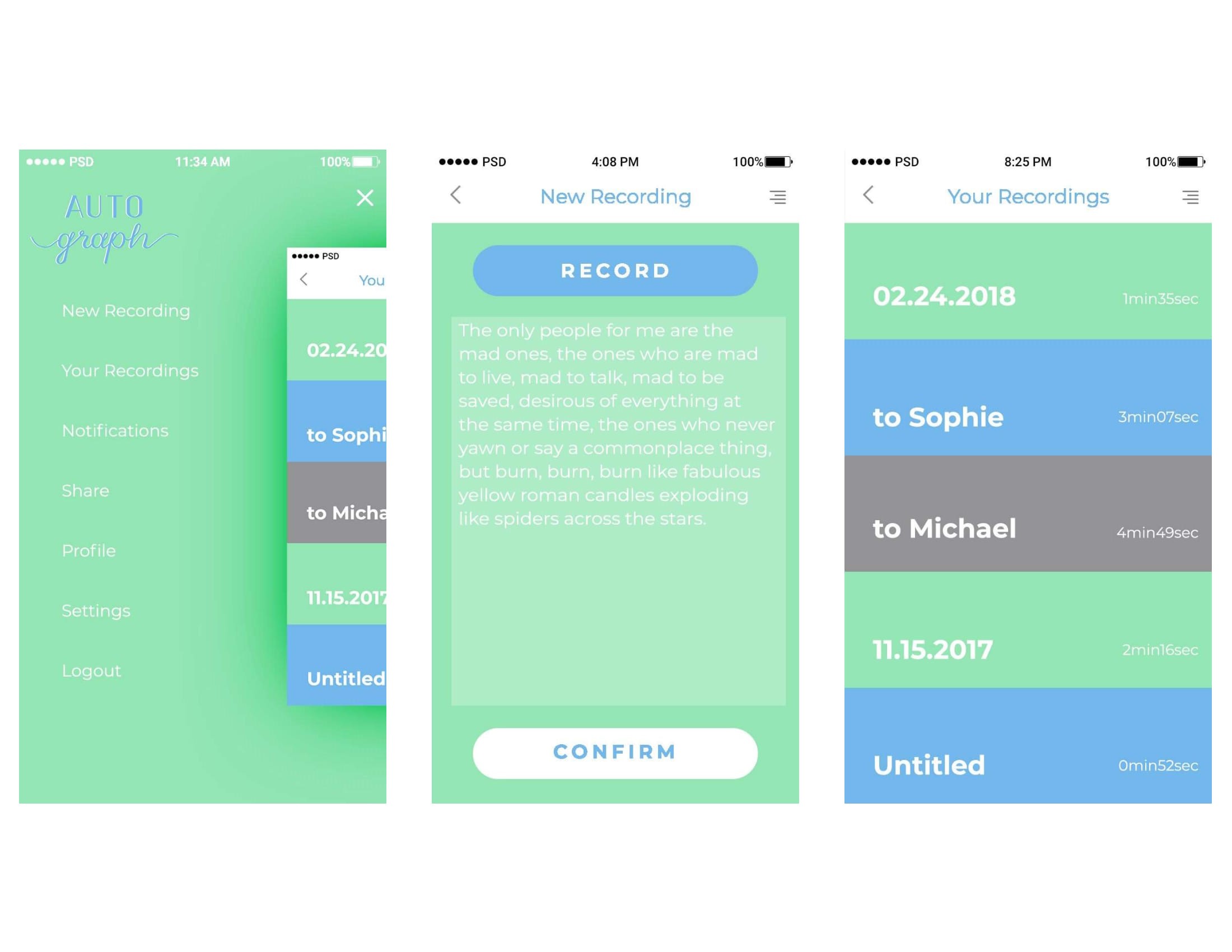
Mobile App Proposal
-
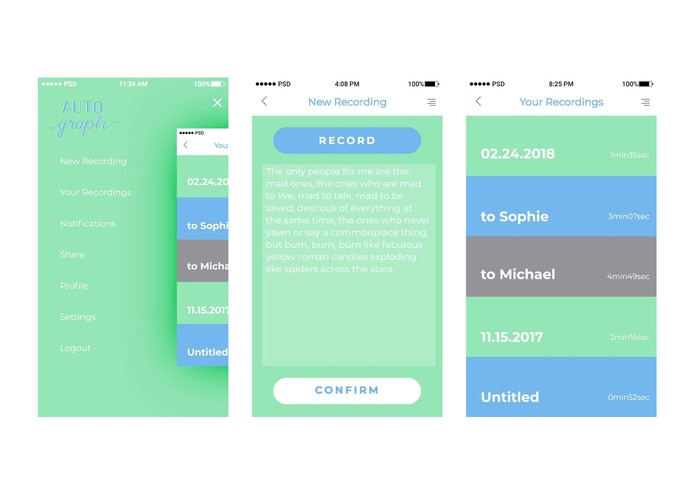
Mobile App Proposal
-
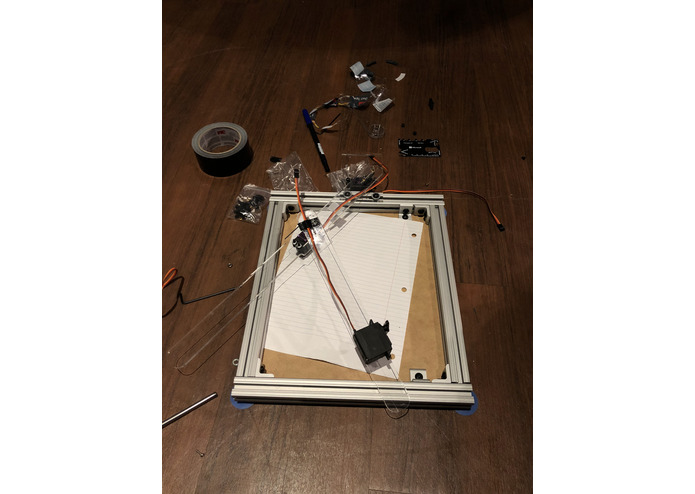
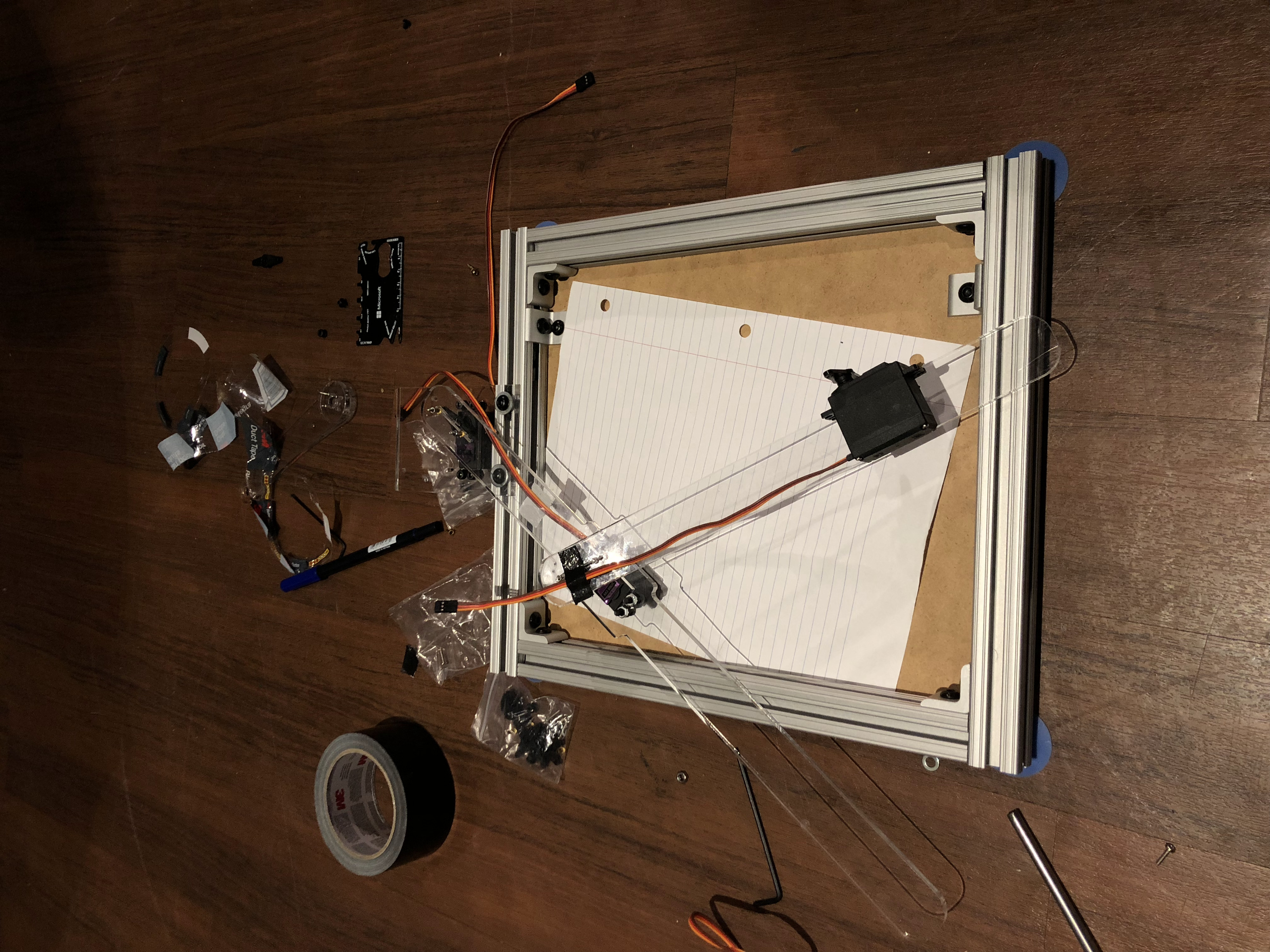
Robot (in-progress)
-

Initial lasercutting


Inspiration
We had seen many variations of robots that can take an image and draw it, so we wanted to expand on the idea and make something more interactive and personal.
What it does
Autograph is a robot that transcribes speech and writes in a custom handwriting based on characteristics of the user’s voice. Depending on pitch, pace, and volume, Autograph generates handwriting that varies in slant, speed, and line weight.
How we built it
Originally, acrylic pieces for the robot arm were laser cut from an open source file. Later on, our design changed slightly, so we created and laser cut our own custom parts to add onto the robot. Currently, Autograph uses three servos and an Arduino Uno, resulting in 3-axis capabilities (with binary movement in the z-axis).
Speech is converted to text using Microsoft's Bing API, and then the text is converted into coordinates for the robot to follow.
Challenges we ran into
The initial arm design we were planning on using wasn't optimal for the functions of our robot. Furthermore, we didn't have access to some necessary components such as bearings and brass standoffs. Thus, we ended up creating an alternate arm design that could combine the pieces we had already laser cut while accommodating the materials available to us. Also, it's really hard to find a database of handwriting that is compatible.
Accomplishments that we're proud of
"Hahahaha" -Joaquin
"Am I proud of anything? Absolutely not." -Nolan
What we learned
It's really hard to create a perfectly functioning robot in <15hrs.
What's next for Autograph
Who knows
Log in or sign up for Devpost to join the conversation.