-
The boys
Inspiration Traditional drone delivery systems are limited by central control, GPS dependency, and poor adaptability in unpredictable environments. I wanted to design a resilient, scalable solution that mimics how nature solves complexity — with autonomous swarms.
What it does Auto Swarm is a decentralized drone delivery system where each drone communicates with others via a mesh network. The swarm self-organizes, adapts to obstacles, and can deliver payloads without GPS, enabling operations in GPS-denied zones like forests, warzones, or disaster areas.
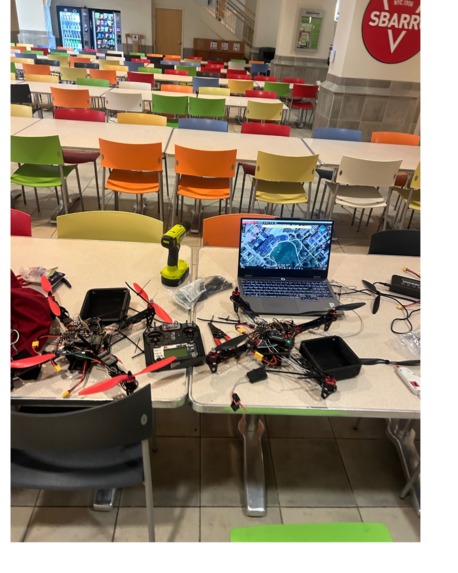
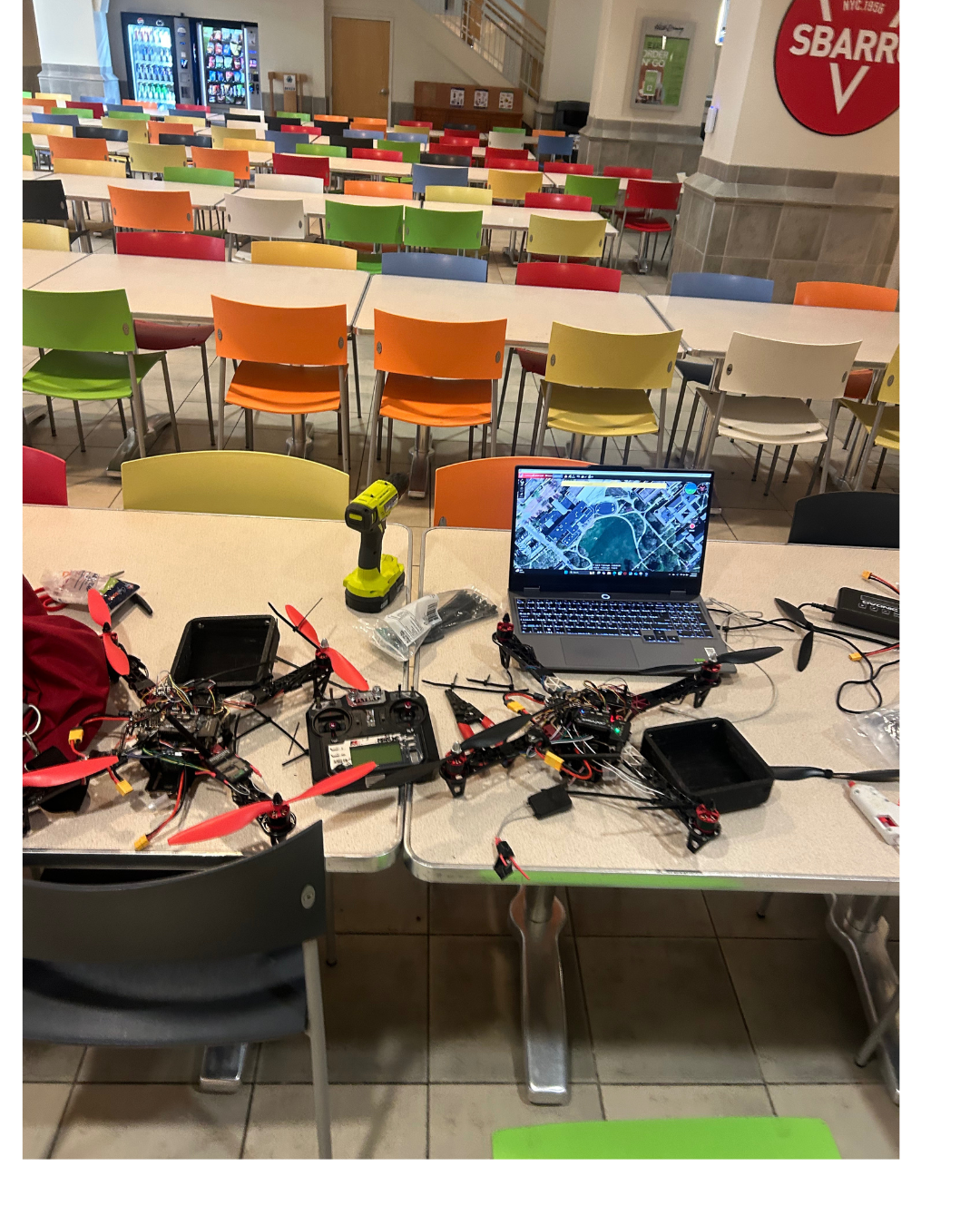
How I built it Used ESP32-based boards with mesh communication to create a lightweight mesh network. Each drone is equipped with a Pixhawk flight controller, VL53L0X distance sensor, an MPU6050 for orientation, and custom algorithms for swarm behavior. I incrementally tested flight logic, inter-drone communication, and real-time coordination.
Challenges I ran into
- Achieving reliable mesh communication in dynamic environments
- Stable Connection to telemetry module
- Fine-tuning motor control and PID stability without external positioning
- Power management and ensuring consistent sensor feedback mid-flight
- Debugging swarm logic in real-time was tricky without a centralized system
Accomplishments that I proud of _ Built two functional units
- Built a fully functional swarm communication protocol
- Achieved a stable test flight on a single drone
What I learned
- Swarm intelligence requires simplicity in individual agents but robust inter-agent logic
- Real-time sensor fusion is critical to maintaining flight stability
What's next for Auto Swarm
- Train reinforcement learning models for emergent swarm behaviors
- Partner with defense, disaster response, or logistics organizations for field testing
Built With
- c
- platform.io
- qgroundcontrol


Log in or sign up for Devpost to join the conversation.