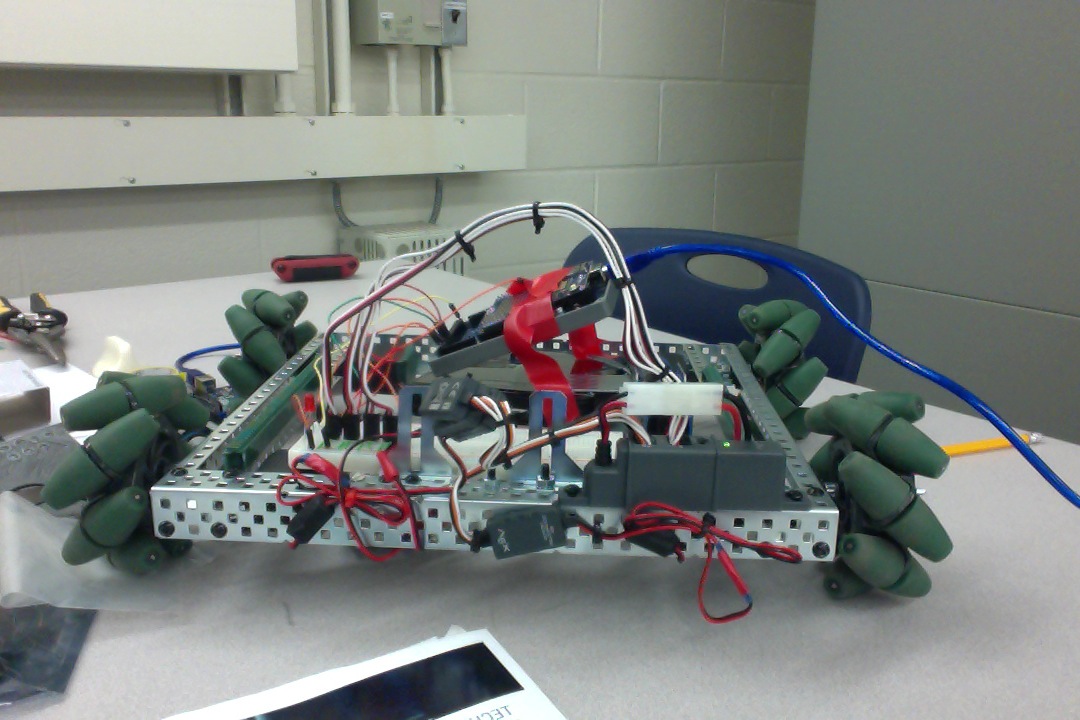
We built a robot that uses mecanum wheels to maneuver. The robot can be controlled by a phone or a pebble. The motors on the wheels are directly controlled by an arduino which receives it's information from the phone over wi-fi by using a shield. The phone then sends commands based on the data given by the accelerometer on the phone. If the pebble would like to be implemented, then the phone receives data from the peddle and passes the data on to the arduino. The pebble passes data from it's accelerator through bluetooth to the phone.
AtlasBot
Updates

Leave feedback in the comments!
Log in or sign up for Devpost to join the conversation.