-
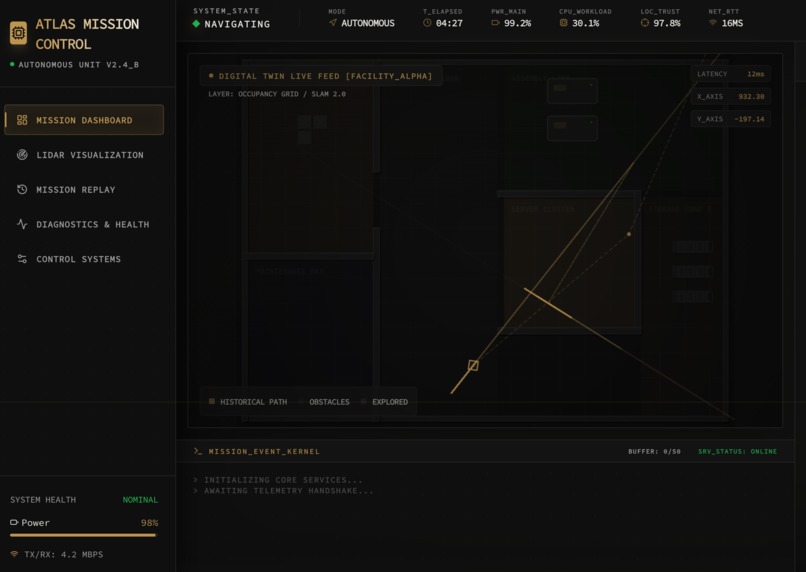
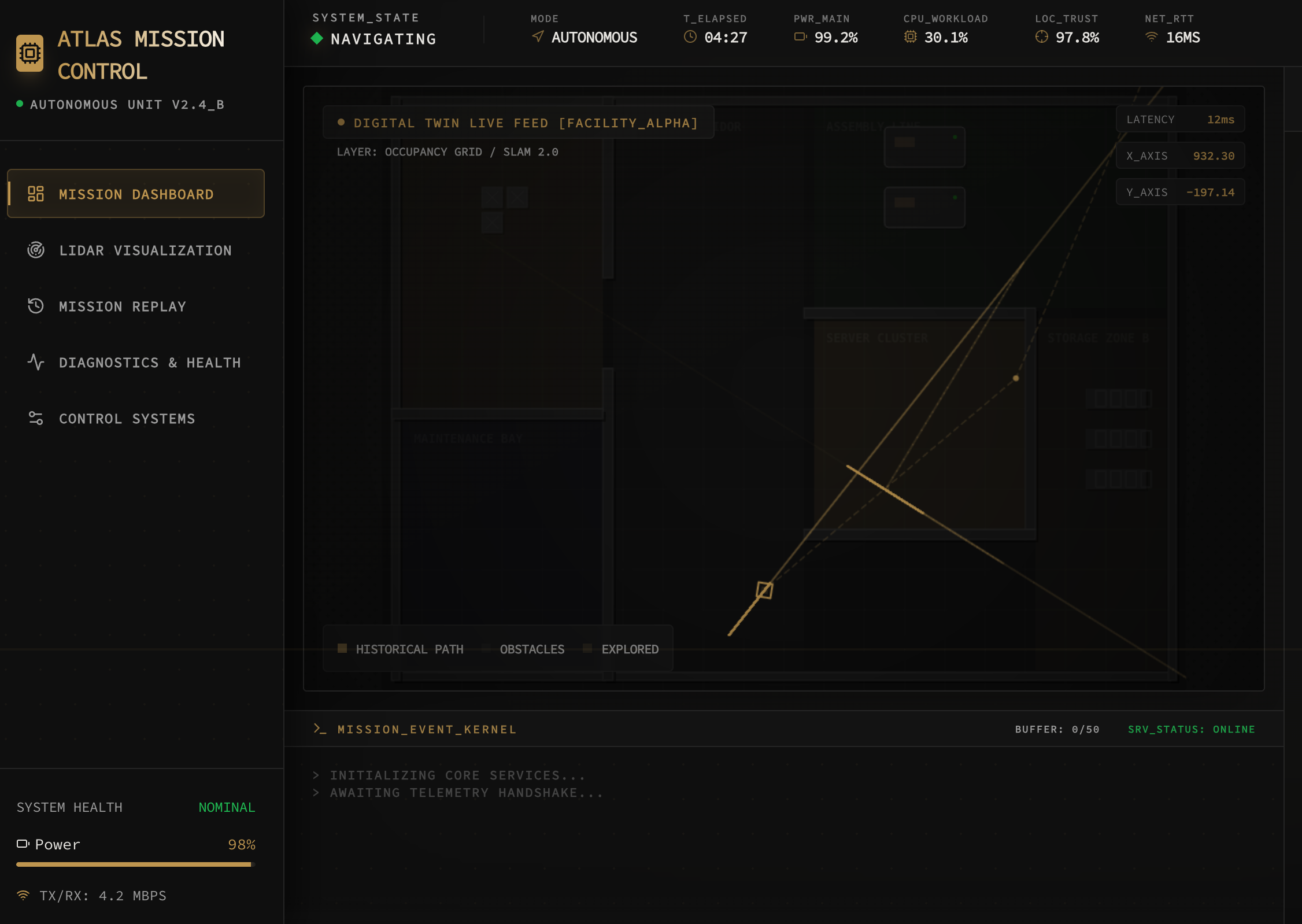
Dashboard
-
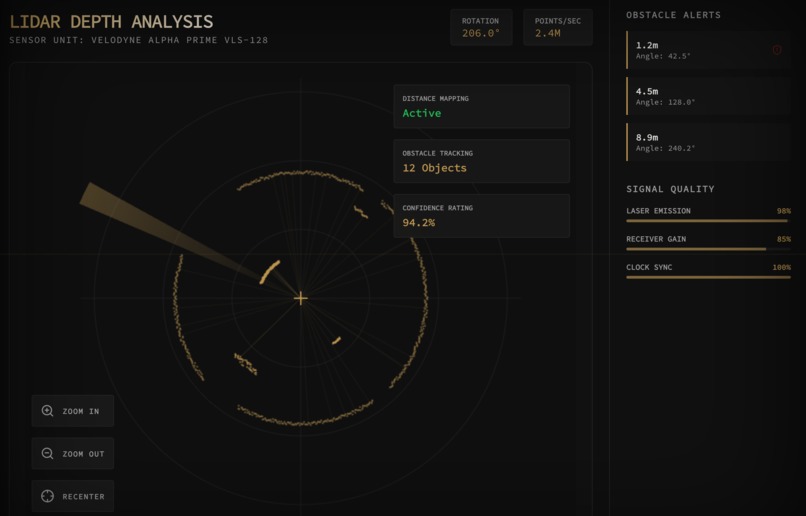
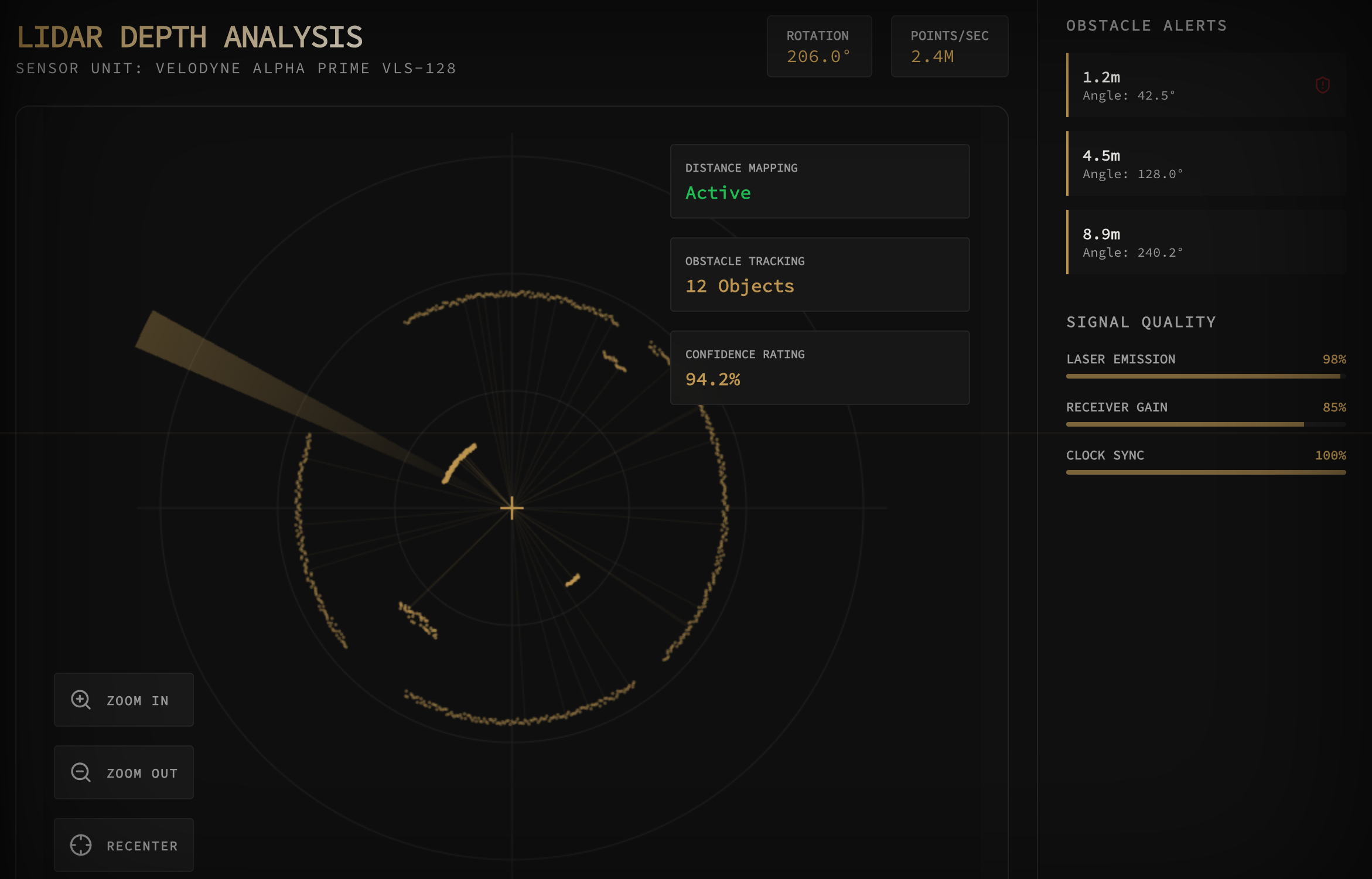
LIDAR viz and analysis
-
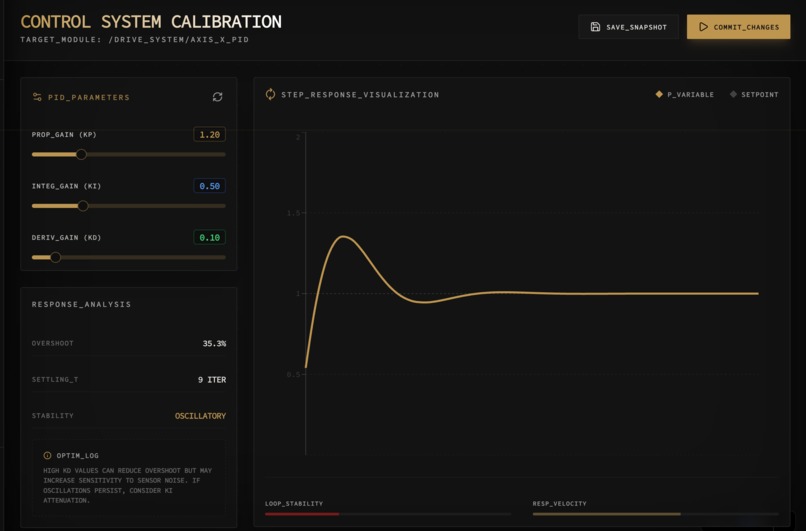
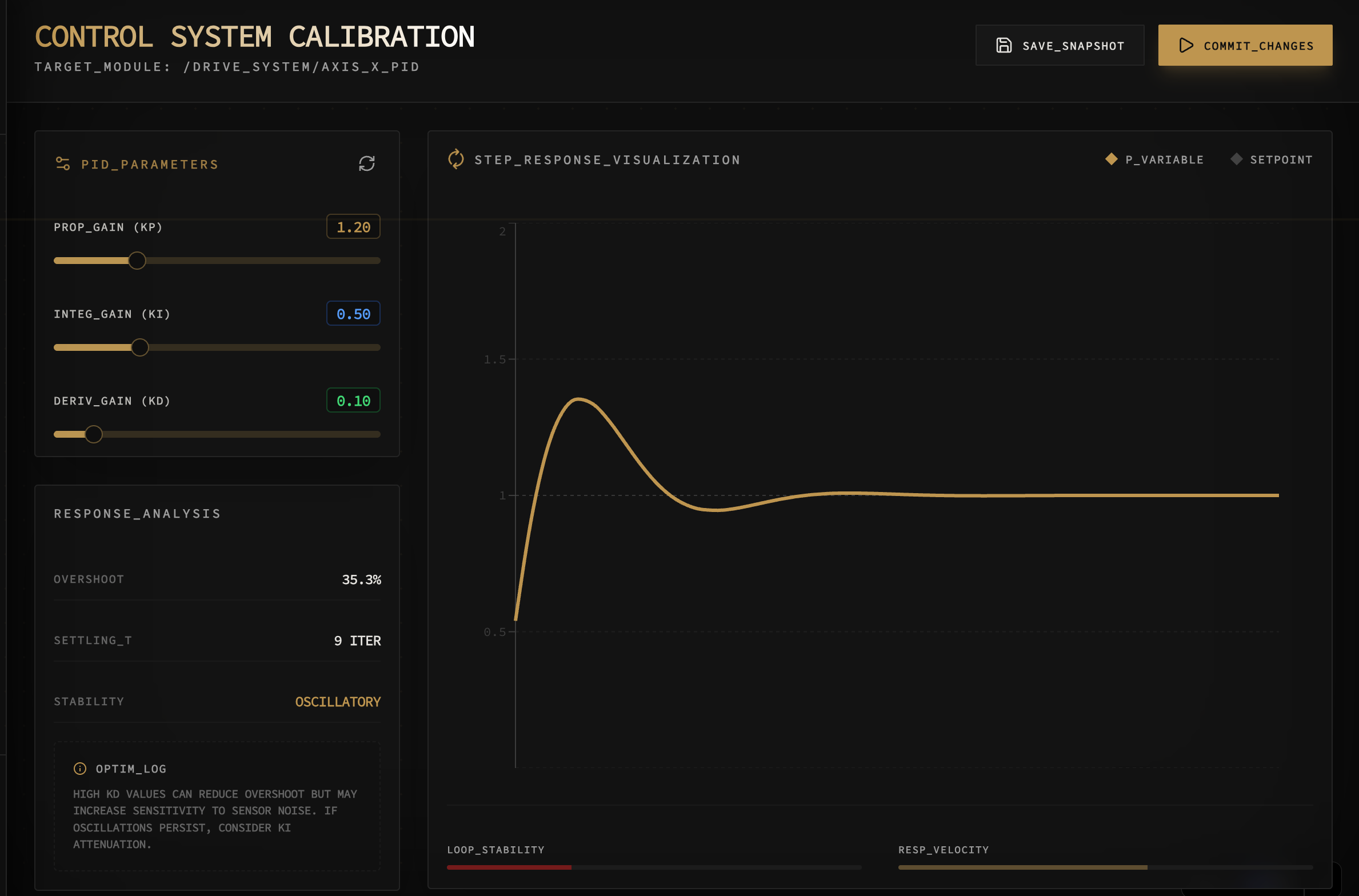
Custom control system to stress test system
Atlas Mission Control
Inspiration
I’ve always been fascinated by robotics systems that operate in the real world — especially the invisible layer behind them: telemetry, mapping, diagnostics, and mission coordination. A lot of robotics projects focus heavily on the robot itself, but the operational software surrounding autonomous systems is just as important.
Atlas Mission Control was inspired by the idea of building a cinematic but technically believable robotics digital twin platform — something that feels like software used inside a real robotics lab or industrial autonomy company.
I also wanted to explore how conversational AI tools like MeDo could accelerate the process of designing and iterating on complex engineering interfaces. Instead of starting from raw frontend boilerplate, I focused on system architecture, realism, UX direction, telemetry behavior, and interaction design.
What It Does
Atlas Mission Control is a web-based robotics mission control platform for autonomous industrial inspection rovers.
The platform simulates:
- real-time robot telemetry
- occupancy mapping
- LiDAR perception
- mission replay
- diagnostics and alert systems
- robotics control monitoring
The system acts like a digital twin environment where operators can monitor an autonomous robot navigating through an industrial facility.
Key features include:
- Interactive occupancy map with robot path tracing
- Real-time telemetry dashboards
- Animated LiDAR visualization
- Mission replay timeline
- Diagnostics and health monitoring
- Event and anomaly logging
- PID/control-system visualization panels
The goal was not to create a generic dashboard, but a believable robotics operations experience.
How We Built It
I built Atlas Mission Control using MeDo as the primary rapid-development environment.
The development process was highly iterative. Instead of generating the entire application at once, I approached the project like a real systems design workflow:
- Define the product identity and mission scenario
- Build the dashboard shell and visual hierarchy
- Develop the occupancy map and telemetry systems
- Refine LiDAR and diagnostics interfaces
- Add motion, replay systems, and operational alerts
- Continuously polish realism and UX consistency
MeDo significantly accelerated:
- frontend scaffolding
- dashboard layouts
- responsive UI generation
- component iteration
- deployment workflows
I used detailed prompt engineering to refine:
- visual coherence
- telemetry realism
- animation behavior
- robotics-oriented terminology
- industrial mission-control aesthetics
A major focus was ensuring the interface felt technically believable rather than just visually flashy.
Challenges We Ran Into
One of the biggest challenges was balancing realism with scope.
Real robotics systems are incredibly complex, and trying to fully recreate SLAM, path planning, localization, and sensor fusion inside a hackathon project would have made the experience overwhelming and unfocused.
Instead, I concentrated on building a convincing operational layer:
- believable telemetry
- coherent system interactions
- realistic diagnostics
- immersive mission visualization
Another challenge was avoiding the “generic AI dashboard” problem. Early iterations looked too much like standard analytics or startup admin panels. I spent a lot of time refining:
- spacing
- typography
- panel hierarchy
- animation restraint
- industrial visual language
The occupancy map and LiDAR systems required the most iteration because they became the emotional centerpiece of the project.
Accomplishments That We're Proud Of
One of the things I’m most proud of is how cohesive the platform feels as a complete robotics system rather than just a collection of dashboard widgets.
The occupancy map, telemetry streams, LiDAR visualization, replay system, and diagnostics panels all work together to create an experience that feels operationally believable.
I’m also proud of the visual direction of the project. Instead of leaning into exaggerated sci-fi or cyberpunk aesthetics, I focused on creating a restrained industrial interface that resembles software used in real robotics environments.
Another major accomplishment was using conversational AI workflows effectively throughout development. Rather than relying on AI only for code generation, I used MeDo as a rapid systems-design collaborator to iterate on architecture, UX, realism, and interaction design.
What We Learned
This project changed the way I think about AI-assisted software creation.
Instead of treating AI as a code generator, I found it much more powerful as a rapid systems-design collaborator. The most important skill became:
- directing iteration
- refining architecture
- controlling visual coherence
- maintaining product identity
I also learned how important presentation and interaction design are in technical products. Even simulated telemetry can feel compelling if the system behaves coherently and communicates information clearly.
Most importantly, I learned that building believable engineering software is not just about technical complexity — it’s about creating systems that feel operationally authentic.
What's Next for Atlas Mission Control
Future versions of Atlas Mission Control could include:
- real ROS2 integration
- live robotics telemetry streams
- SLAM-based mapping
- multi-robot fleet coordination
- autonomous route planning
- cloud mission synchronization
- real hardware interfaces
I would also like to explore integrating real robotic simulation environments and hardware-in-the-loop testing to transform the platform from a simulated digital twin into a true robotics operations system.
The long-term vision is turning Atlas Mission Control into a scalable robotics mission orchestration and digital twin platform for autonomous systems.
Built With
- MeDo
- Interactive telemetry systems
- Digital twin visualization concepts
- Robotics mission-control design principles
- Web-based dashboard technologies
- Simulated robotics telemetry
Built With
- architecture
- concepts
- design
- digital
- engineering
- frontend
- industrial
- interfaces
- lidar
- map
- mission
- mission-control
- occupancy
- replay
- responsive
- robotics
- twin
- ui/ux
- web-based

Log in or sign up for Devpost to join the conversation.