
Inspiration 🤠 🪐
The project is based on another project called the University Rover Challenge, where teams build a Rover too do a mock mars mission .
What it does ⚙️
The goal of the project was to teleoperated the mini Rover using a web page. We do not reach this goal because hardware had issues, but we made significant progress on the initial design and software!
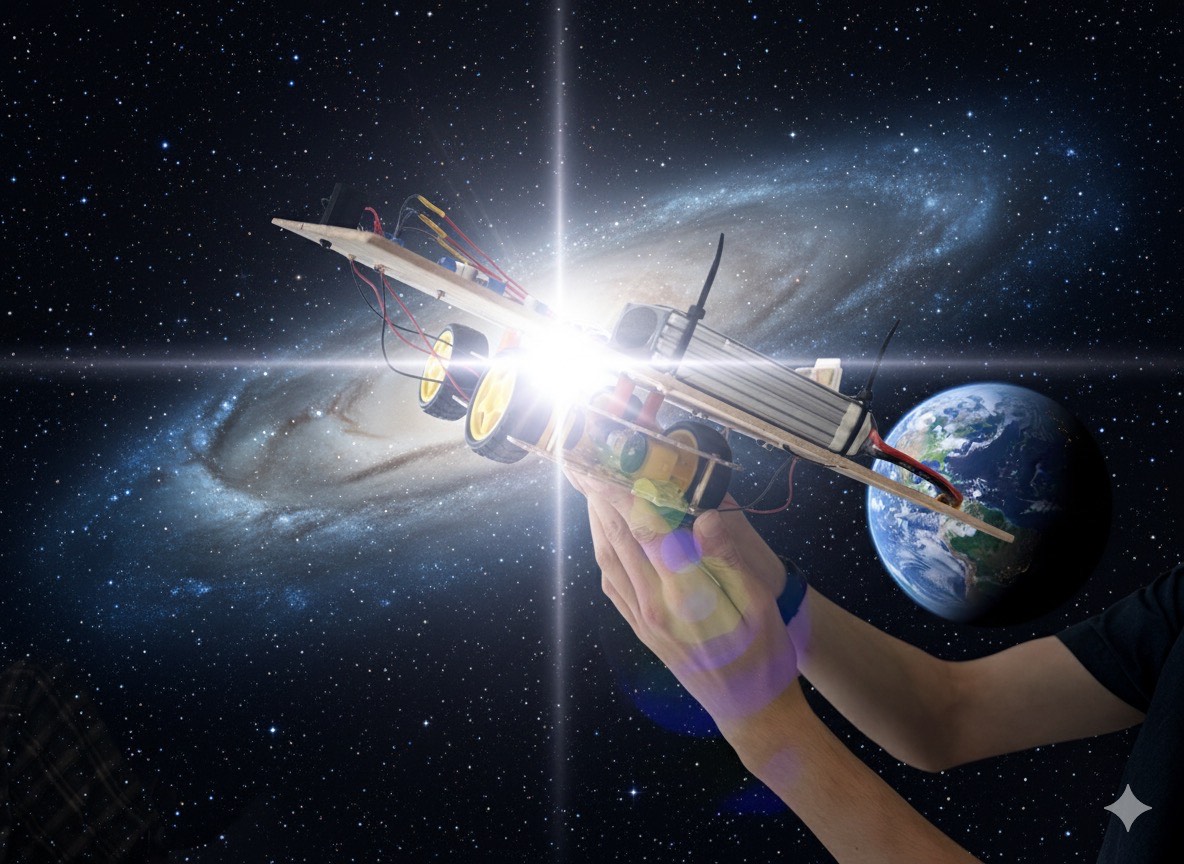
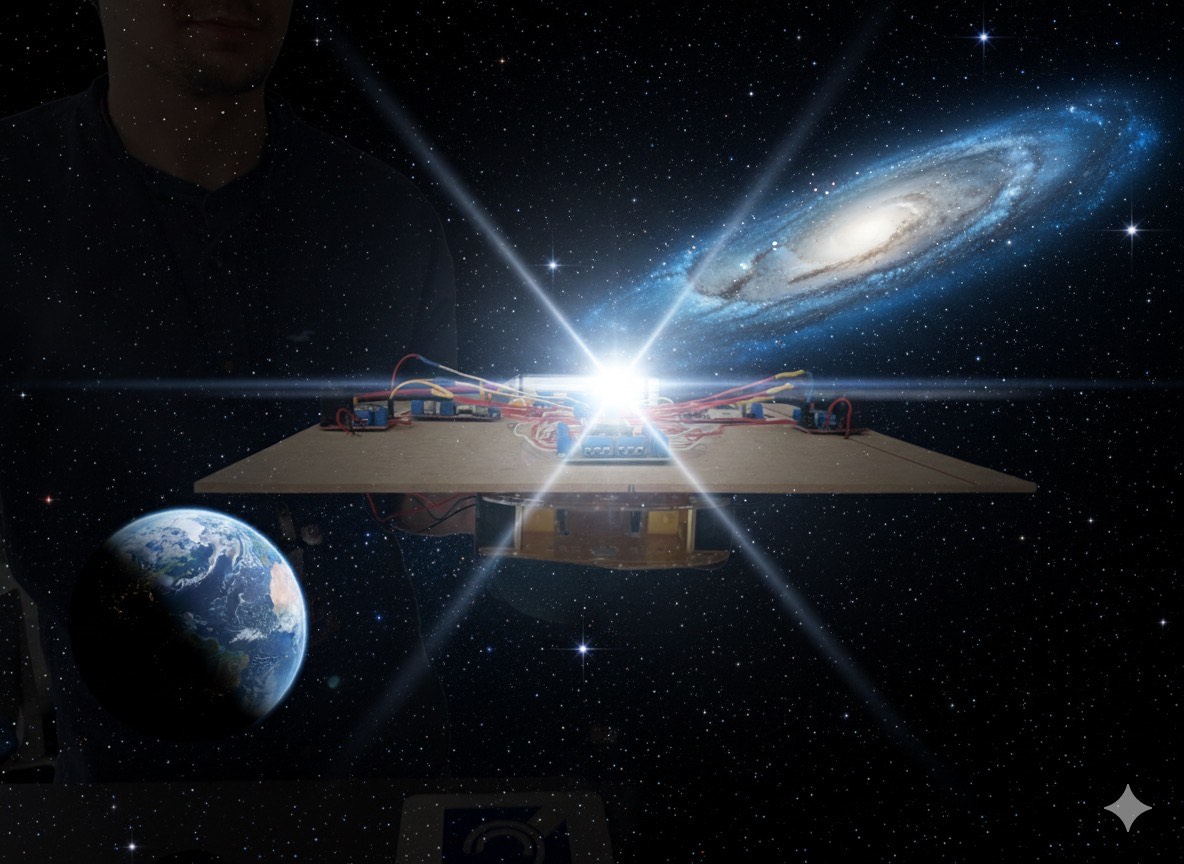
How we built it 🔧
We use off the shelf components and assembled a prototype Rover using just jumper wire. We took that prototype circuit and implemented onto perf board too make it more stable and permanent. We used an ESP32 microcontroller and microPython to design the control system for the the rover with an onboard computer.
Challenges we ran into 👽
The hardware's had issues from implementing the circuit onto a perf board, solder joints connecting components disconnected making some motors impossible too power. Also early we had to modify the circuit because our microcontroller gave out 3.3,v logic, but our motor drivers except 5v logic.
Accomplishments that we're proud of 🤖
We were able too take a jumper wire prototype circuit and implement it onto a perf board and temporarily control the mini Rover with it. We also built and tested a custom high-speed message passing library for transmitting low-level robotics sensor and motor control signals (4 million messages / second!!).
What we learned 🧠
Always prepare and test your hardware if your doing a hardware project, because some piece of hardware will always have problems creating a bottleneck for your project. We also learned how to make high-performance python wrappers for C libraries.
What's next for Astro Pup 🚀 🐕
Integrate a raspberry pi 4 for more compute for the Rover, integrate a camera for computer vision, fix the solder joints to get all motors of the mini Rover working properly, get wirelessly communication working for mini Rover for teleoperation.



Log in or sign up for Devpost to join the conversation.