-
-
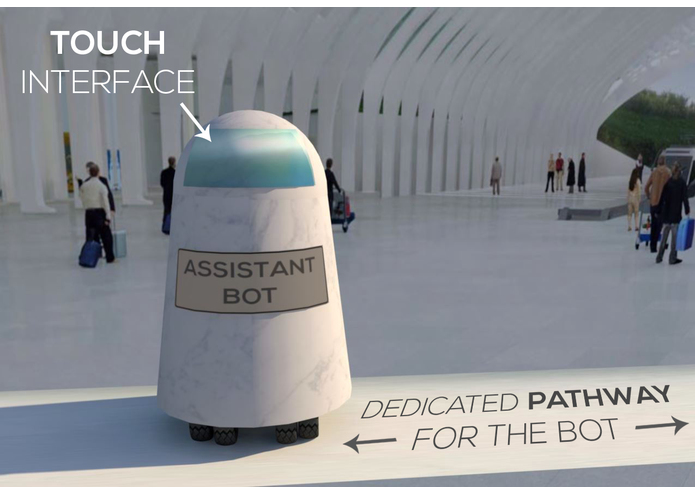
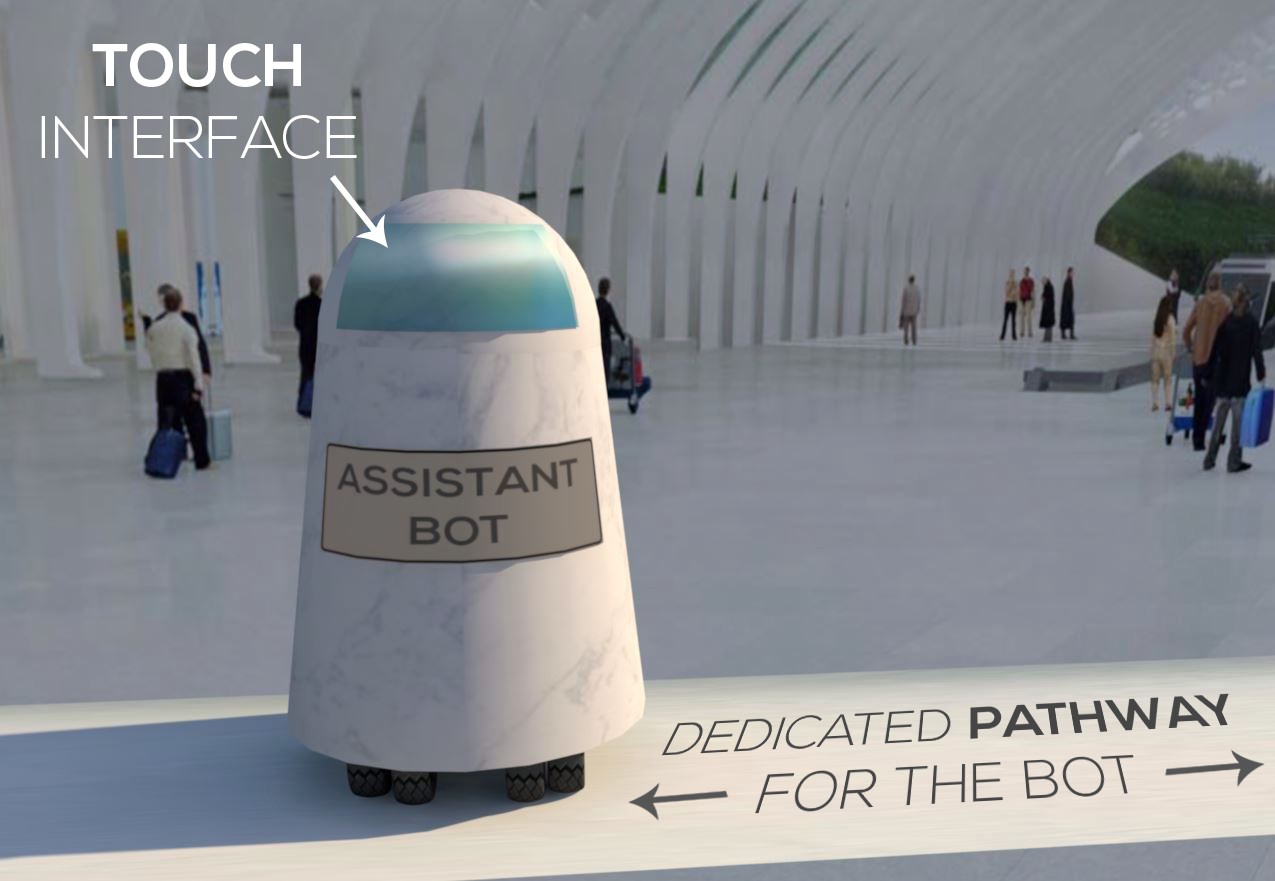
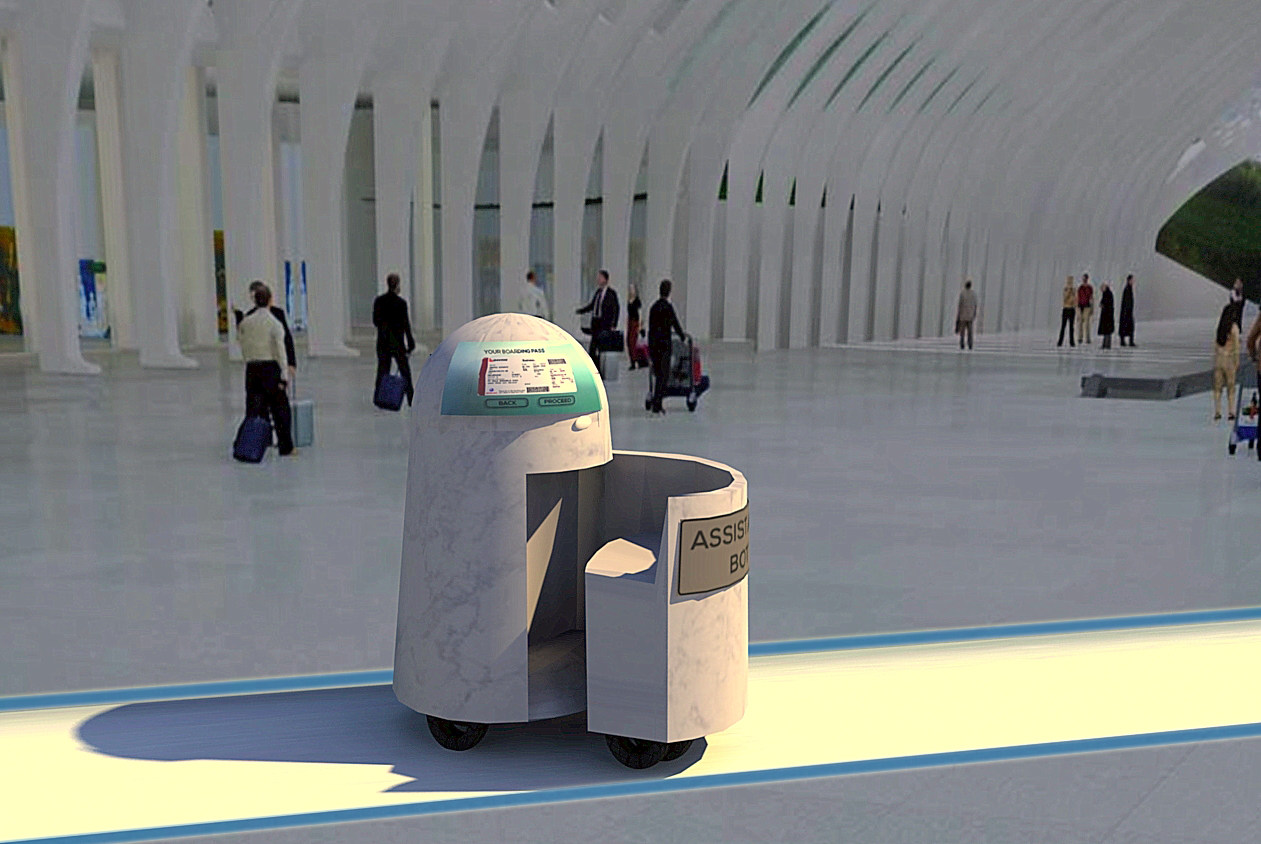
Final Design (Guidance and assistance)
-
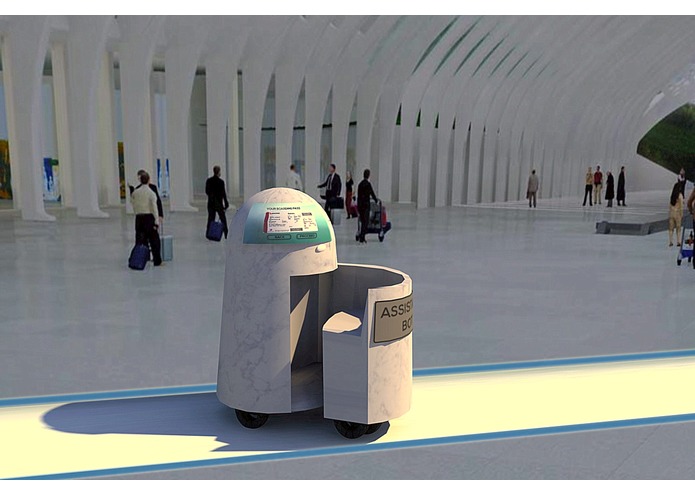
Final Design (for transportation)
-
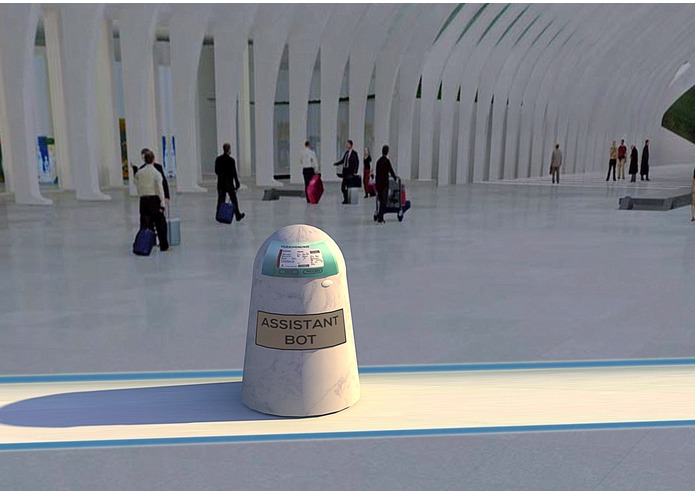
Final Design (Deactivated)
-

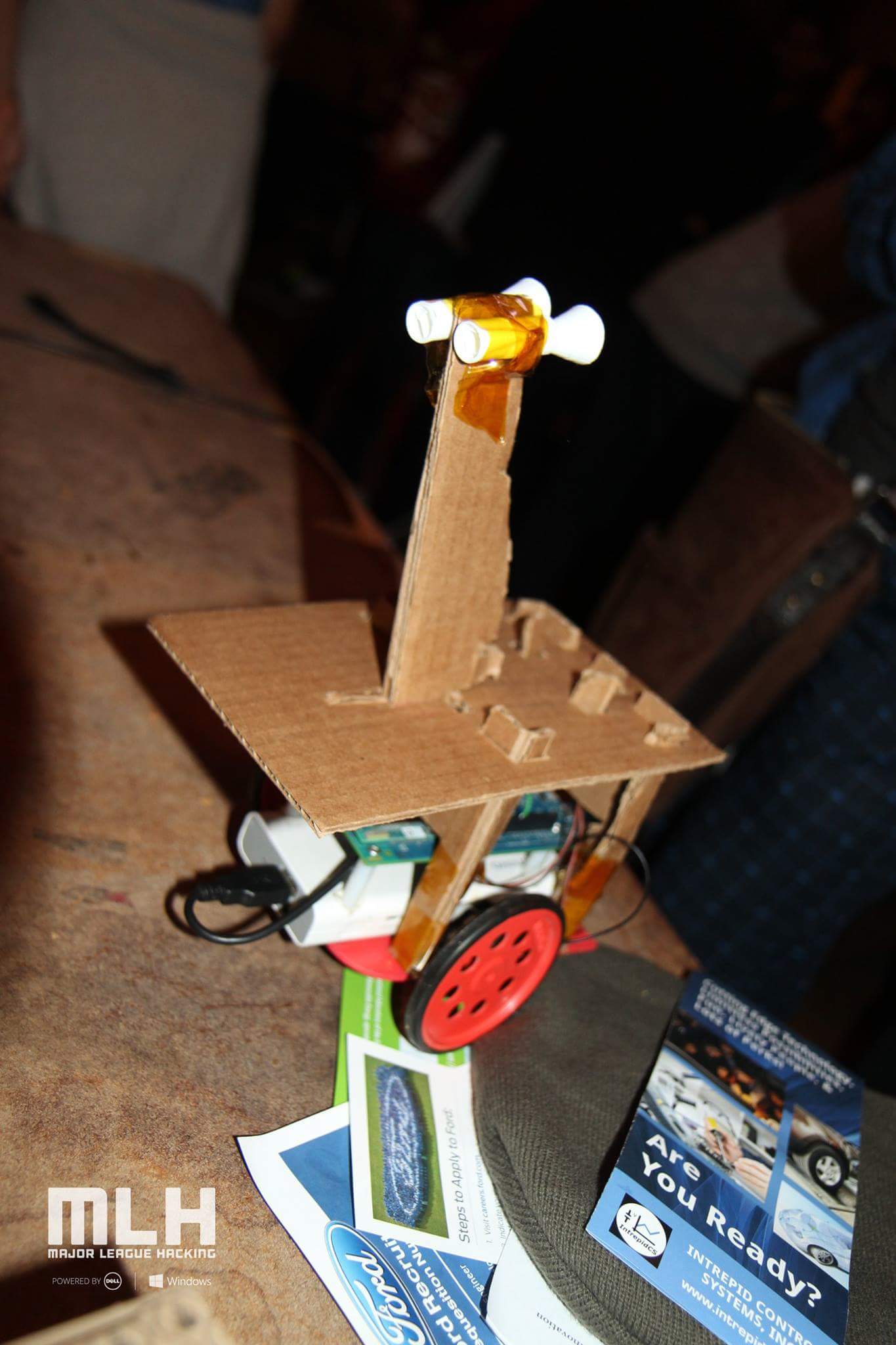
First Prototype (With Project Tango)
-

First Prototype (Without Project Tango)
-

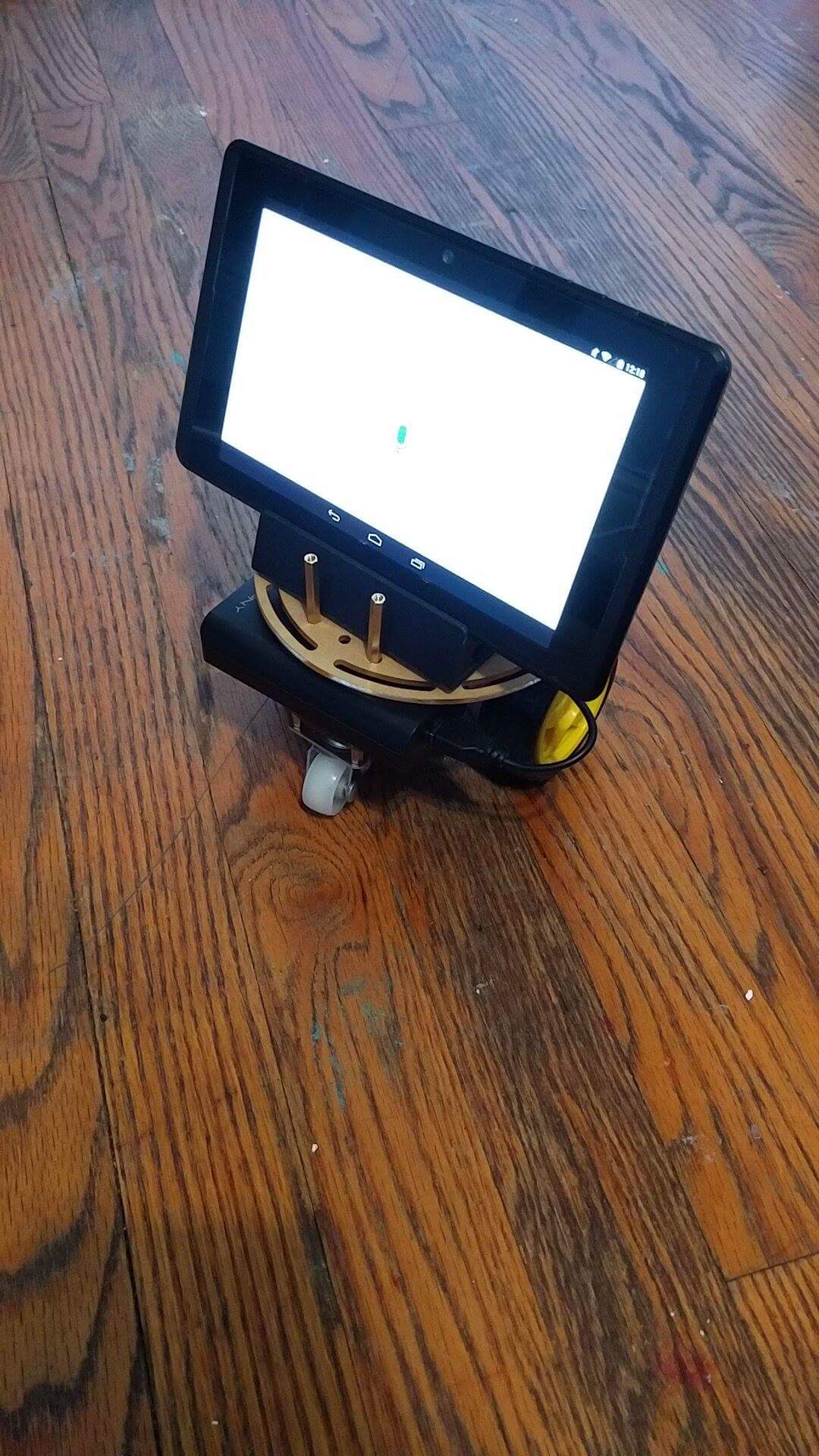
Second prototype (Rpi Zero & project tango) front
-

Second prototype (Rpi Zero & project tango) side
-

Second prototype (Rpi Zero & project tango) back
-

Implementation with a bicycle (Side)
-

Implementation with a bicycle (Back)
-

Implementation on a cycle (handle)
-

Implementation on a cycle (Rpi)
-

Implementation on a cycle (front)
-

Implementation on a cycle (turning)










Inspiration
While travelling to Hong Kong for the demo of a project called Air-Ink, I missed my flight because of the different procedures that were there in the airport which made me late for the flight. After somehow rescheduling the flight for the next day, I had to stay one whole day at the airport, thinking about how this delay could be solved, I thought about making a robot but not the one which runs on artificial intelligence or something. A simple machine that "Assists" you through all of the different procedures at the airport and all the places where you are in a rush, assist you not only with a building but places and not only first timers but also to people with disability. I worked on making the description about the project and how it can be used in different perspectives and all of the components that would be required in it. The only part that I was stuck at was to improve and replace the guidelines that I thought of as pathways for assist bot to be replaced with something else. That is when I met Md at Mhacks 8 who came up with the idea of using google project tango for mapping of the paths of the bot and using them in order to make the bot run on them using certain algorithms. So, during Mhacks 8, we worked on developing a small-scale model of the robot using the idea that all of the team members got and it actually worked out pretty well. We then thought about why not deploy it on the IoT platform as well to feed in all of the paths that have been recorded to a server which was the final touch to this project to make it completely autonomous indoor as well as outdoor navigation robot with the capability to be deployed with a solar panel to become self charging and eco-friendly. So, the final idea became to make a robot that uses the capabilities or Virtual Reality Accelerometer as well as GPS mapping techniques in order to enable a simple robot to carry up to 2 people and help them move around the city autonomously by just speaking the name of the destination, without any error and without any use of energy from any non-renewable sources of energy.
What it does
Apart from being solar powered, this project has a new system for being autonomous. This project uses something called a google project tango for first recording the path from one point to another, using values from GPS sensor and Accelerometer of the google project tango tablet. The google project tango uses the sensors to record the movements of the tablet with respect to the origin and feeds it to a small server that we've created on our computer. This server then saves the recorded paths in a large database of mapped paths and gives them labels as are commanded by the user. These tagged recorded paths that have been saved on the servers are then downloaded by the robot based on the current GPS position and the destination that has been spoken by the passenger. The robot then follows the previously recorded paths that it downloaded from the server as per its current position and the name of the destination it received from the user. Moreover, it also keeps on checking in certain intervals of time about the errors that are there in deviation from the path and based on another algorithm, it corrects itself making sure that there are no problems during travelling. Moreover, for obstacle detection, we have used several sensors to it which we would replace by Xbox Kinect in later stages so that it stops whenever it detects an obstacle in front of it and waits for it to pass and then continues on the same path. Therefore, in summary, it makes sure that there is no error in its autonomous driving and the robot can be made to help anyone to travel anywhere indoors as well as outdoors autonomously.
How we built it
This project was initially thought about being built using simple logical reasoning which was later changed on to the google project tango mapping. This project, therefore, was then made using google project tango mapping. We made the first prototype of the project at Mhacks 8 in Detroit Michigan using intel edison board connected the google project tango with both of them connected to a common server. The path recorded using the google project tango was fed to the server and read by the intel edison board based on the algorithm that I developed to convert those coordinates of the path into delay time and polarity of the motors based on which the time and way in which the motor works is decided. From that time, we replaced the intel edison board with raspberry pi and attached several sensors to it to avoid obstacles and also made several iterations to the algorithm that was previously made.
Challenges we ran into
The challenge was to make an algorithm that was necessary for helping the robot move on the recorded path. In order to ensure that it does, we developed another algorithm that checks if the bot is deviating from its path and corrects its error at certain intervals of time. Moreover, we still currently have a problem of integrating a better collision sensor for which we will be using Xbox Kinect so that a better field of view for all of the obstacles will be available. Moreover, we had several challenges while making the android based google project tango application as well as connecting it to a common server.
Accomplishments that we're proud of
Most of the problems that we listed above were solved after the first prototype was built. In the second prototype that we made, we have improved the model that we had earlier and made the project better than before. To get the algorithm working in a good manner along with the obstacle detection algorithm and integrating everything to the common server was one of the biggest accomplishments that enabled the project to become much better than it was before.
What's next for Assist Bot
We are currently just done with implementing of a manual mode of driving using a gamepad which works in a similar way as a driving simulator with the throttle keys on the gamepad acting as throttle and brake pedal and analogue sticks carrying out the steering function. This will enable people to have the joy of using the robot in their own ways as well. Assistant Bot will, later on, run on bigger and better Lithium Ion batteries with much more powerful motors that can cause easily move about 2 people that are sitting in the bot. The assist `bot will be also powered by only solar energy which will make it eco-friendly and self-powered which would remove the problem of pollution from the mode of transportation up to a particular extent.
What we learned
During the development of this project, we learnt a lot of things. Rather than just the technical knowledge, this project taught us how to manage work, work as a team, how to take decisions in a short while of time and how dedication to a particular project can prove to be really fruitful in the end.






Log in or sign up for Devpost to join the conversation.