
Project Story
About the Project
The Art Gallery Projector System – Depth Map and Canvas Detection was created to explore how technology can transform traditional gallery experiences. The inspiration came from visiting art exhibitions where projection mapping and digital overlays were done manually, often requiring expensive equipment and significant setup time.
I wanted to design a low-cost, automated solution that makes it easier for galleries to measure canvases, detect their positions, and enable projection with precision. This project is built around the idea of blending computer vision with interactive art spaces, giving curators and artists new ways to showcase their work while keeping the process efficient and accessible.
What I Learned
While working on this system, I strengthened my skills in:
- Computer Vision with OpenCV: Detecting flat surfaces and analyzing contours from depth data.
- Depth Mapping: Processing RGB images and Kinect v2 data to simulate and interpret depth maps.
- Hardware-Software Integration: Running Kinect v2 with Raspberry Pi for real-time performance.
- Measurement and Calibration: Calculating canvas size and distance with reasonable accuracy.
This project also gave me experience in structuring computer vision pipelines for real-world use.
How I Built It
The system combines hardware and software components:
- Data Capture: Kinect v2 collected RGB frames and depth data.
- Depth Map Generation: RGB images converted into depth maps using grayscale conversion and edge detection.
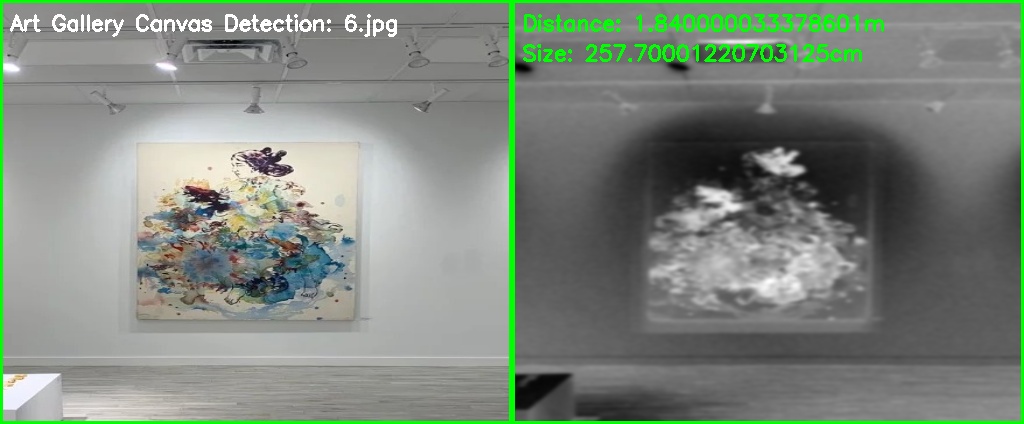
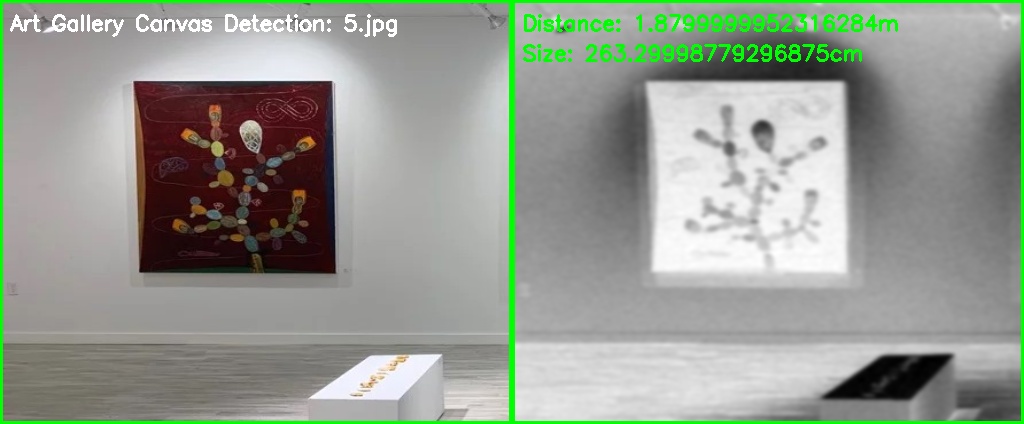
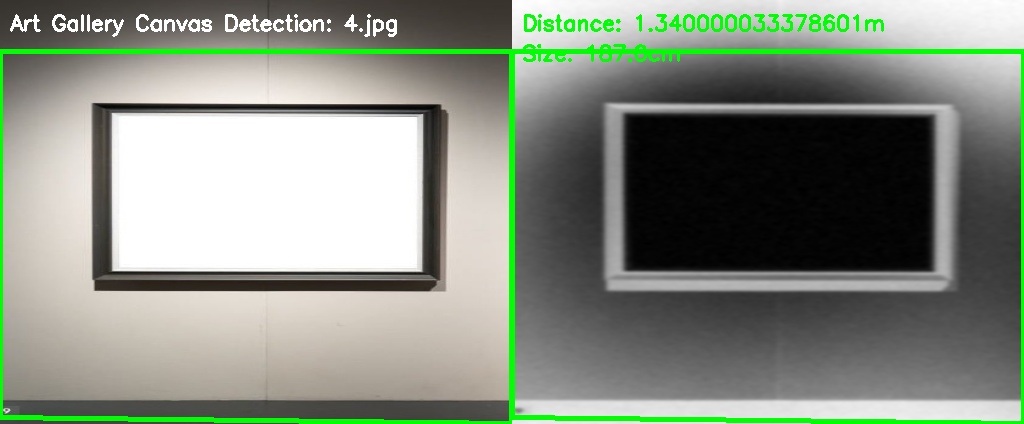
- Canvas Detection: OpenCV contour detection identified flat, rectangular canvases.
- Distance and Size Calculation: Depth data was used to compute the distance and approximate size of each canvas.
- Visualization: Side-by-side outputs showed the original image, depth map, and annotated results.
- Projection Alignment: Detected canvases were aligned for accurate digital overlays.
The system runs on Raspberry Pi OS, using Python, OpenCV, and NumPy for processing.
Challenges Faced
- Depth Data Noise: Raw Kinect data needed preprocessing to reduce noise.
- Contour Accuracy: Canvas detection was sensitive to lighting conditions.
- Hardware Limits: Raspberry Pi required optimization to handle OpenCV efficiently.
- Calibration: Achieving accurate distance and size measurements involved fine-tuning.
These challenges provided valuable lessons in optimizing computer vision for real-time use.
Next Steps
- Support detection of multiple canvases at once.
- Integrate AR-based guides for exhibitions.
- Use AI to recognize specific artworks for cataloging.
- Expand projection features with interactive overlays.
Built With
- kinect-v2
- matplotlib
- numpy
- opencv
- python
- raspberry-pi

Log in or sign up for Devpost to join the conversation.