-
-
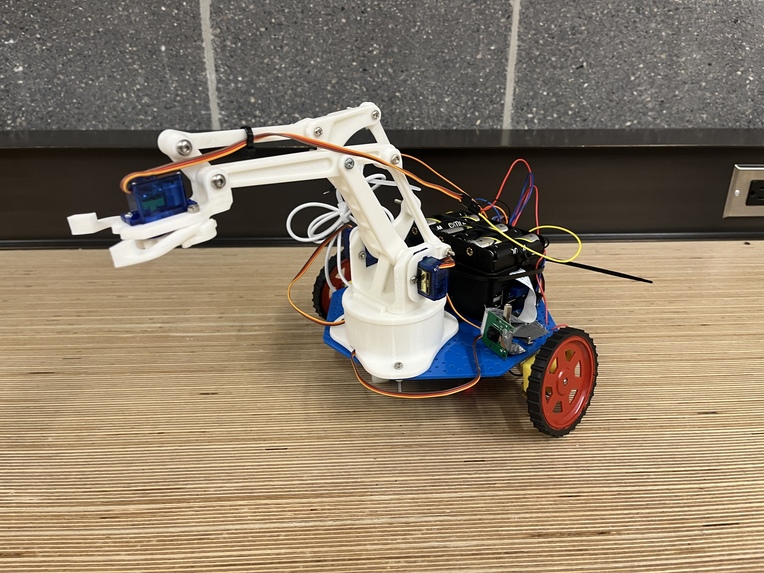
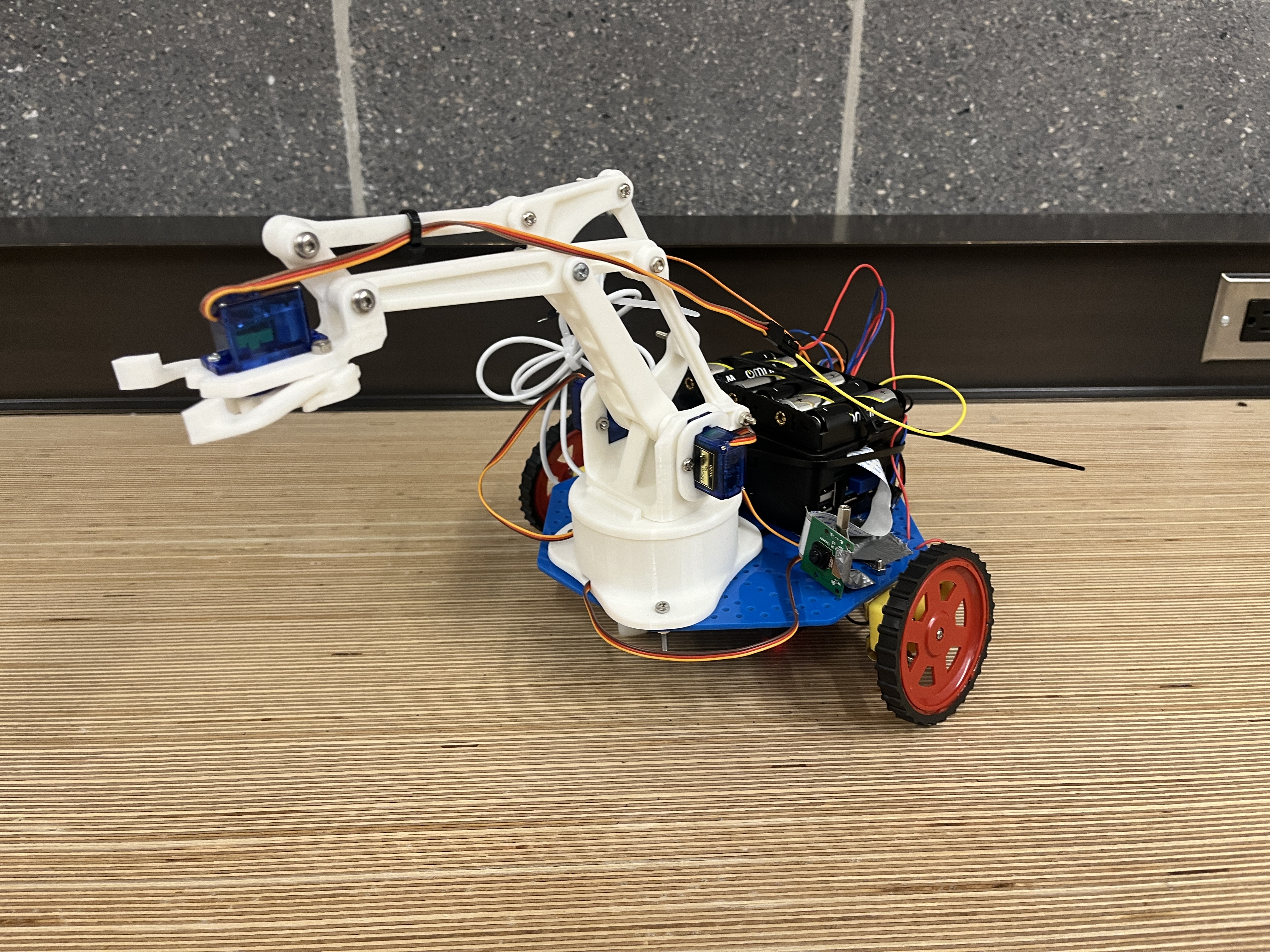
Side View 1
-
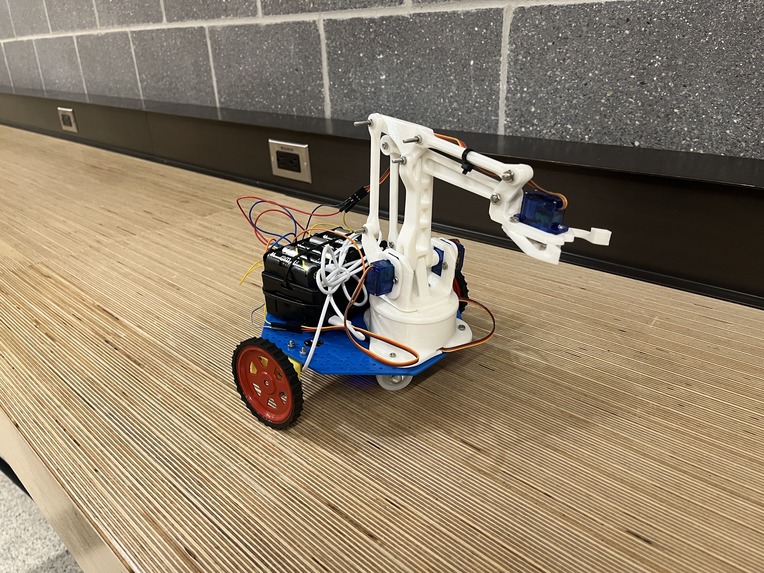
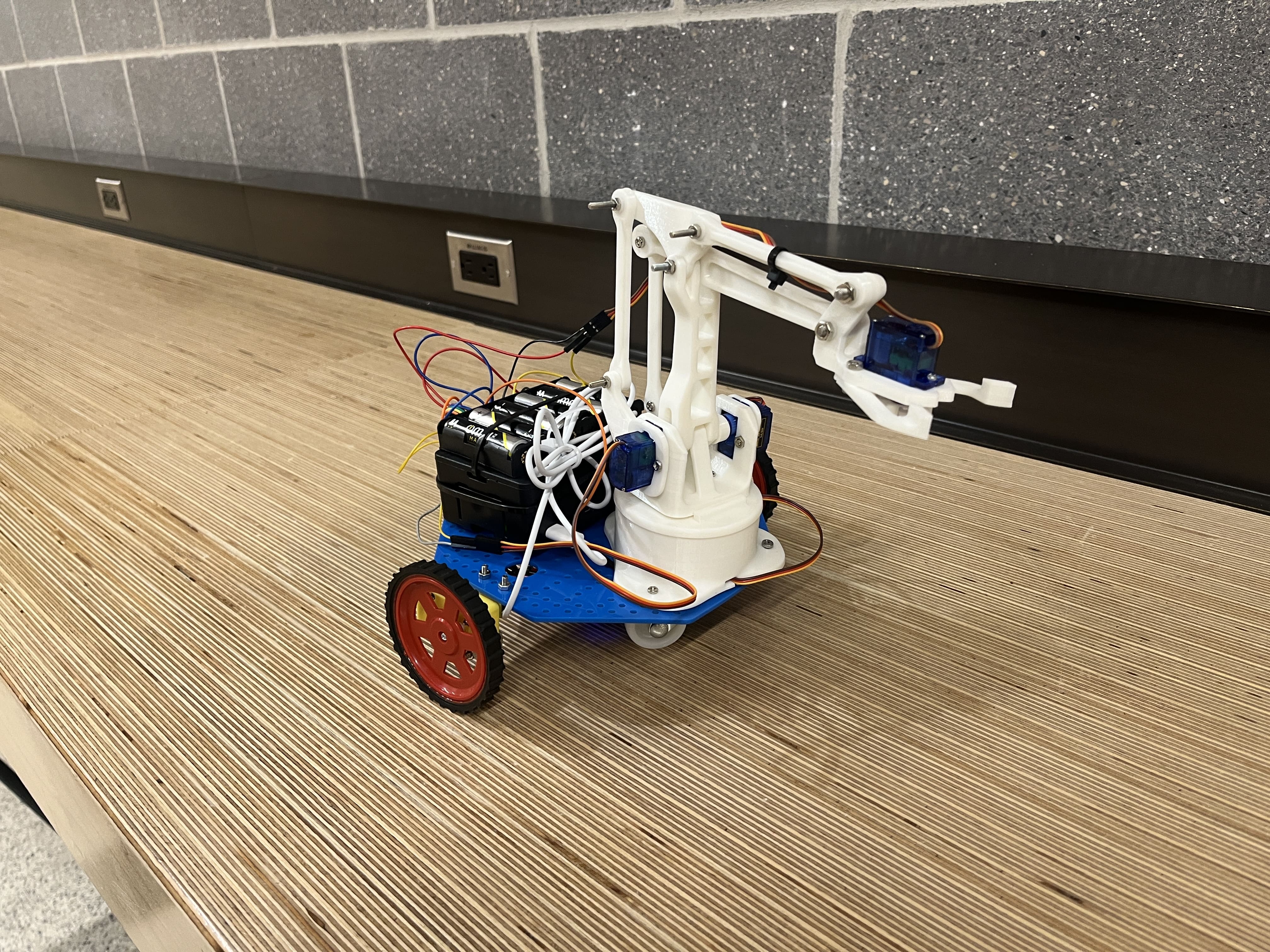
Side View 2
-
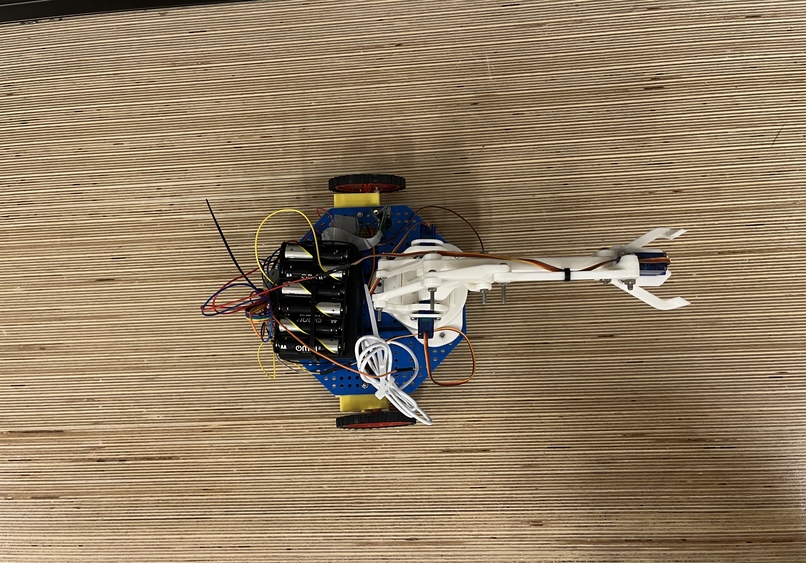
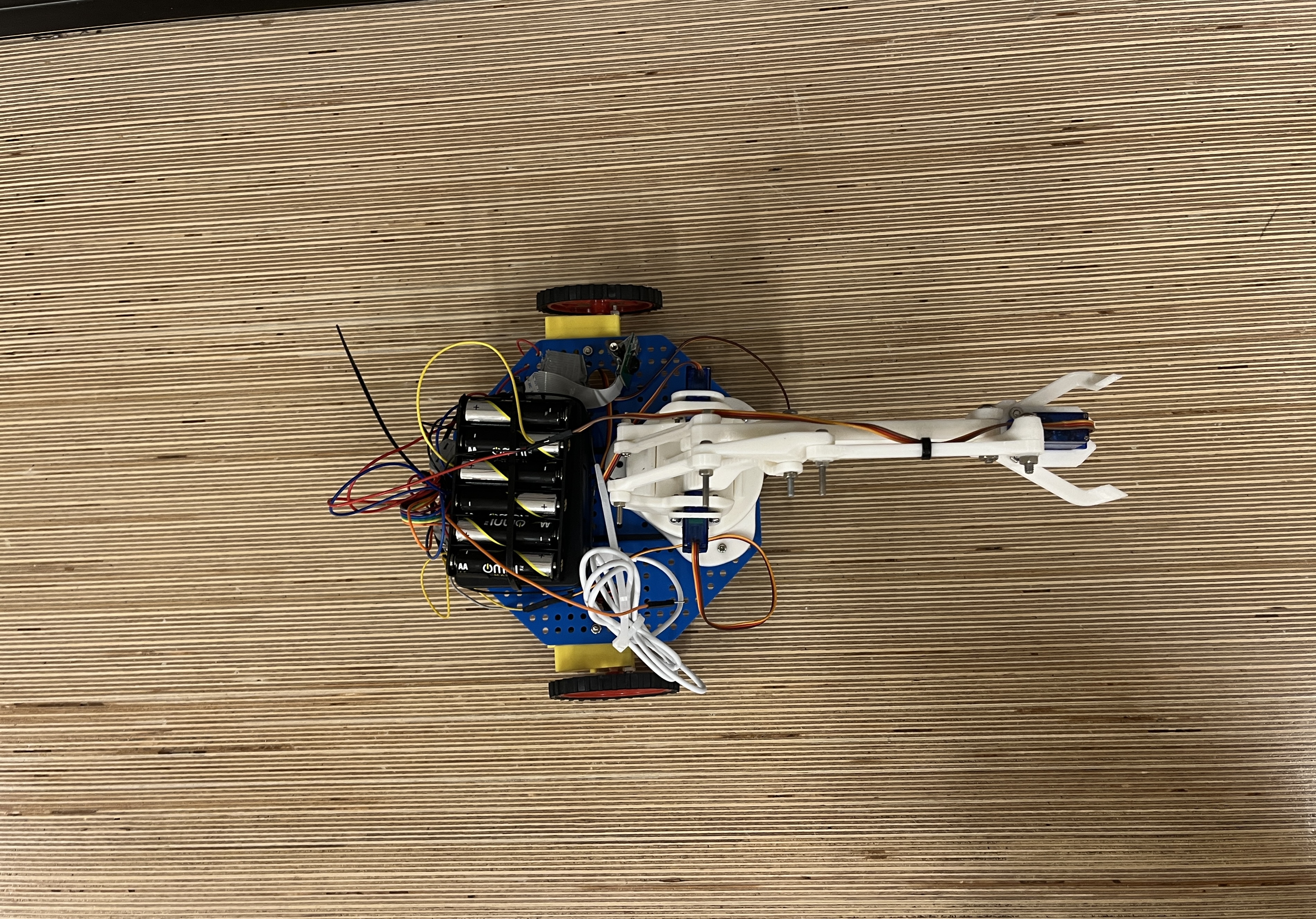
Top-Down View
-
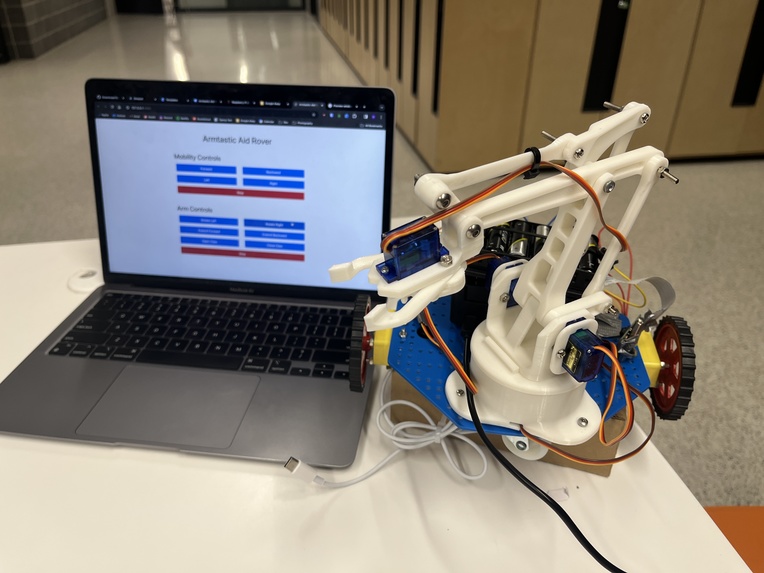
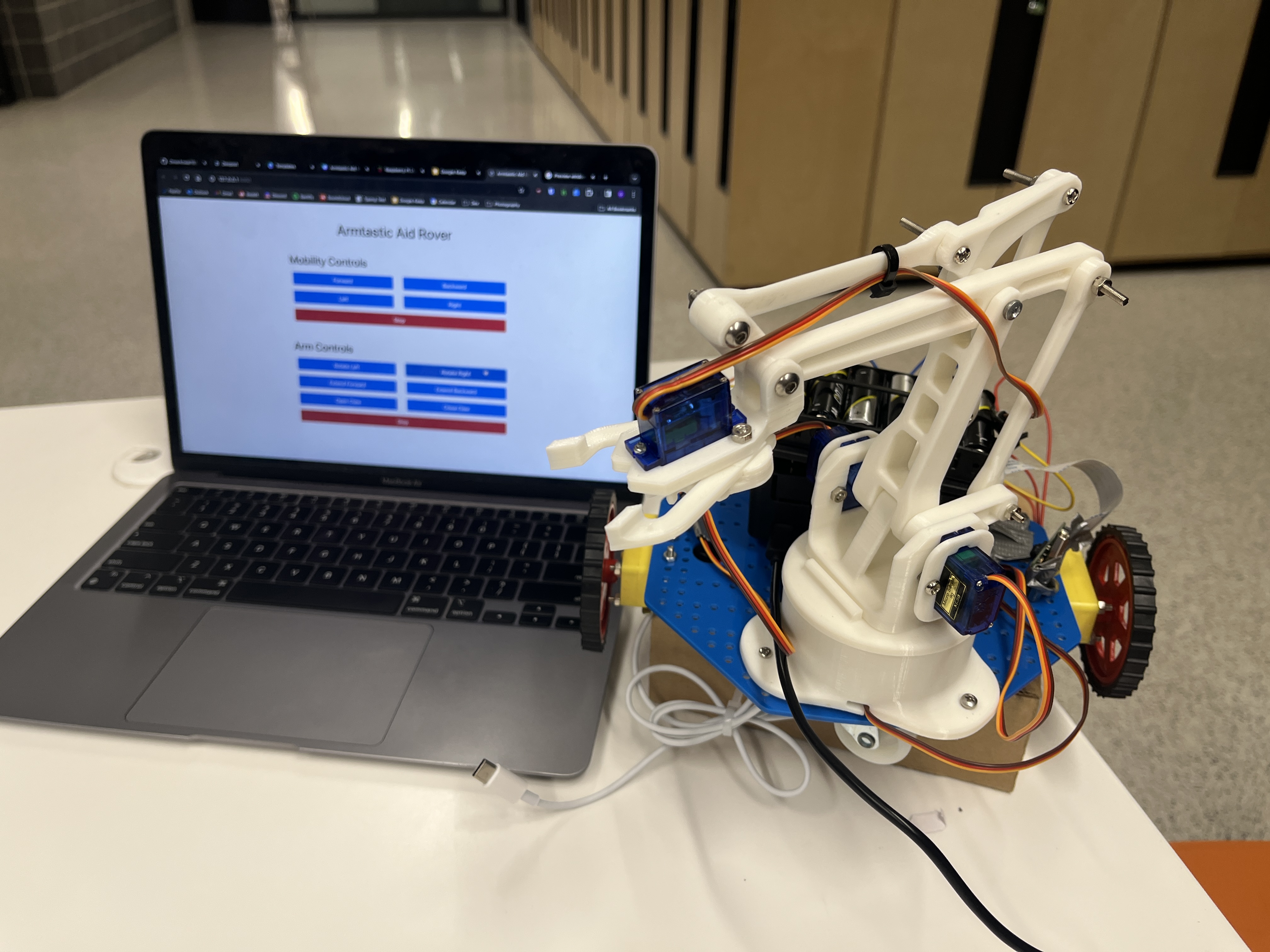
App-View (camera added after)
Inspiration
We were inspired by the idea of using technology to help people in difficult situations, such as natural disasters, medical emergencies, or social isolation. We wanted to create a rover that could be controlled remotely from anywhere in the world, and that could deliver essential items to those who need them.
What it does
Armtastic Aid Rover is a rover that you can control remotely from anywhere, allowing you to aid those in need, through the use of its robotic arm and built-in camera, to bring them their urgent needs. You can use a web interface or mobile interface to see what the rover sees, and to control its movement and arm. In future iterations, the rover would be able to carry items such as food, water, medicine, or even a teddy bear, and deliver them to the person in need.
How we built it
We built the rover using a Raspberry Pi, a camera module, a motor driver, several DC and servo motors, along with a 3D printed robotic arm. We used Python to program the rover's functionality, and Flask to create the web interface. We used HTML, CSS, and JavaScript to design the web interface, and a rigid plastic frame to be able to withstand harsh environments.
Challenges we ran into
We faced many challenges while building the rover, such as:
- Finding the right components and materials for the rover and its arm
- Connecting the components and wiring them correctly
- Programming the rover's movement and arm control
- Creating a responsive and user-friendly web interface
- Testing the rover's functionality and performance
- Reinstalling Raspbian three times due to corrupted SD cards
Accomplishments that we're proud of
We are proud of:
- Building a working rover that can be controlled remotely and that can deliver items to people in need
- Learning how to use various hardware and software tools and technologies
- Overcoming the challenges and difficulties we faced
- Having fun and collaborating as a team
What we learned
We learned a lot from this project, such as:
- How to use a Raspberry Pi and its peripherals
- How to program in Python and Flask
- How to use HTML, CSS, JavaScript, and Socket.IO
- How to design and build a robotic arm
- How to test and debug hardware and software issues
- How to work as a team and communicate effectively
What's next for Armtastic Aid Rover
We have many ideas for improving and expanding our project, such as:
- Adding more sensors and features to the rover, such as GPS, temperature, humidity, etc.
- Improving the rover's design and durability, using more robust materials and components
- Enhancing the web interface's functionality and appearance, using more advanced frameworks and libraries
- Deploying the rover in real-world scenarios and testing its impact and usefulness
- Adding microphone and speaker functionality, and improving the overall real-world usability of the project.
- Sharing our project with others and inspiring them to use technology for good
Log in or sign up for Devpost to join the conversation.