-
Trinity arm and Adhawk Mindlink
-
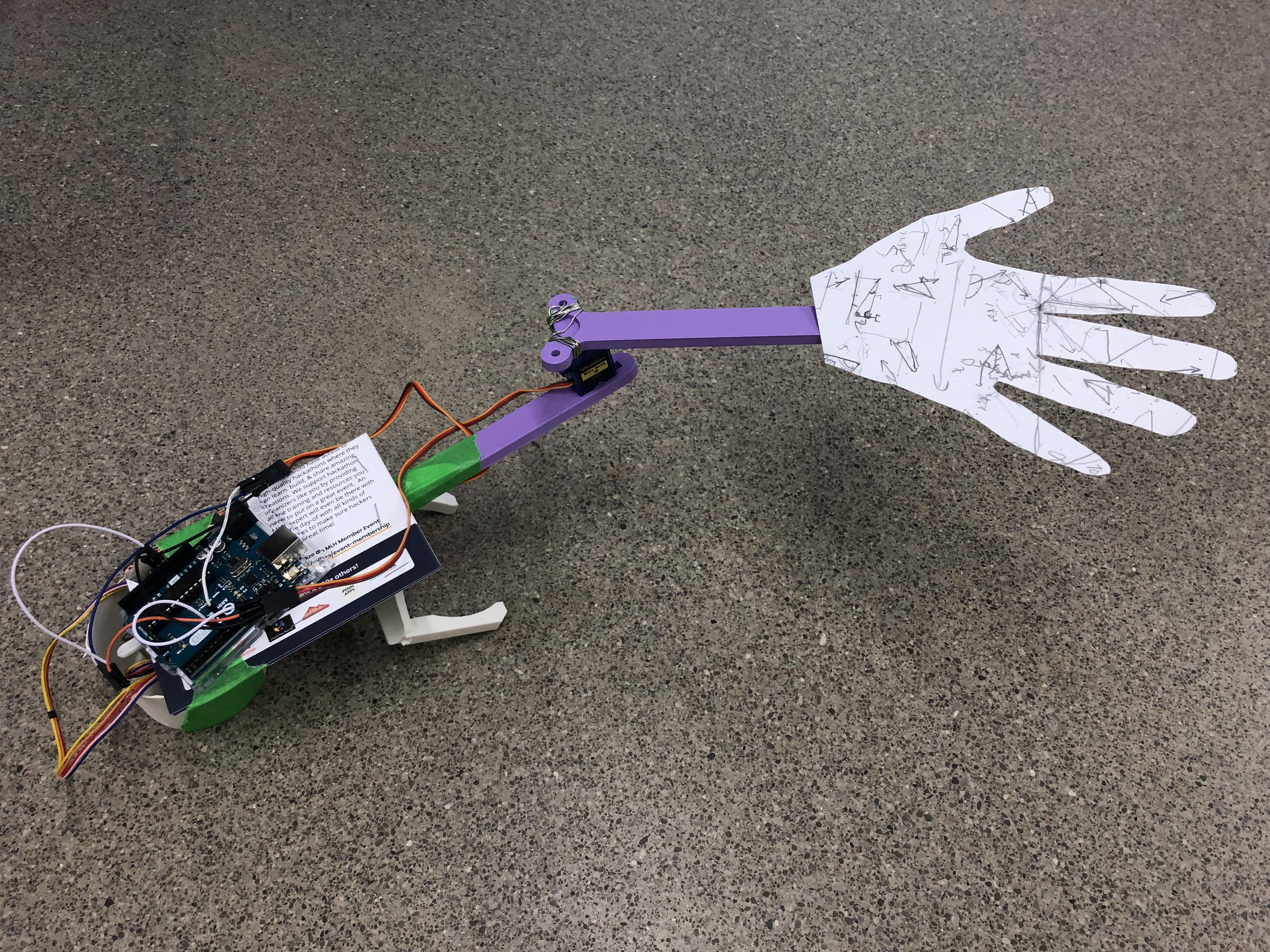
Trinity arm
-
Trinity arm

Inspiration
Sometimes, when you're focused and doing something with your hands, it can be frustrating when both of your hands are full. With this robotic arm, you are able to not get distracted and retrieve what you need!
What it does
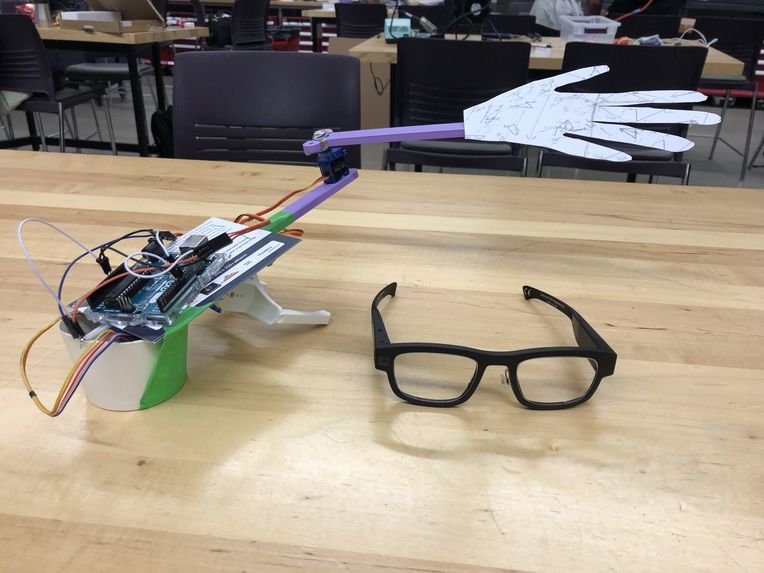
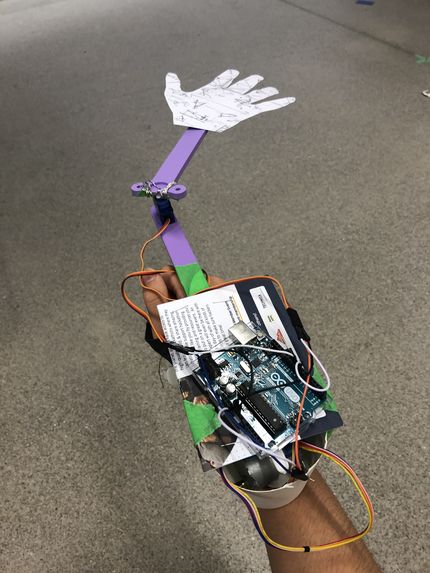
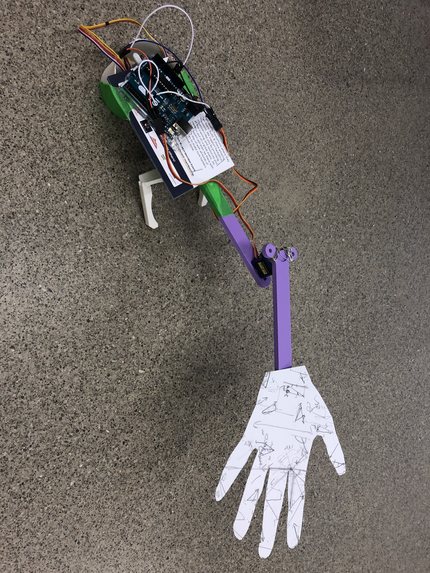
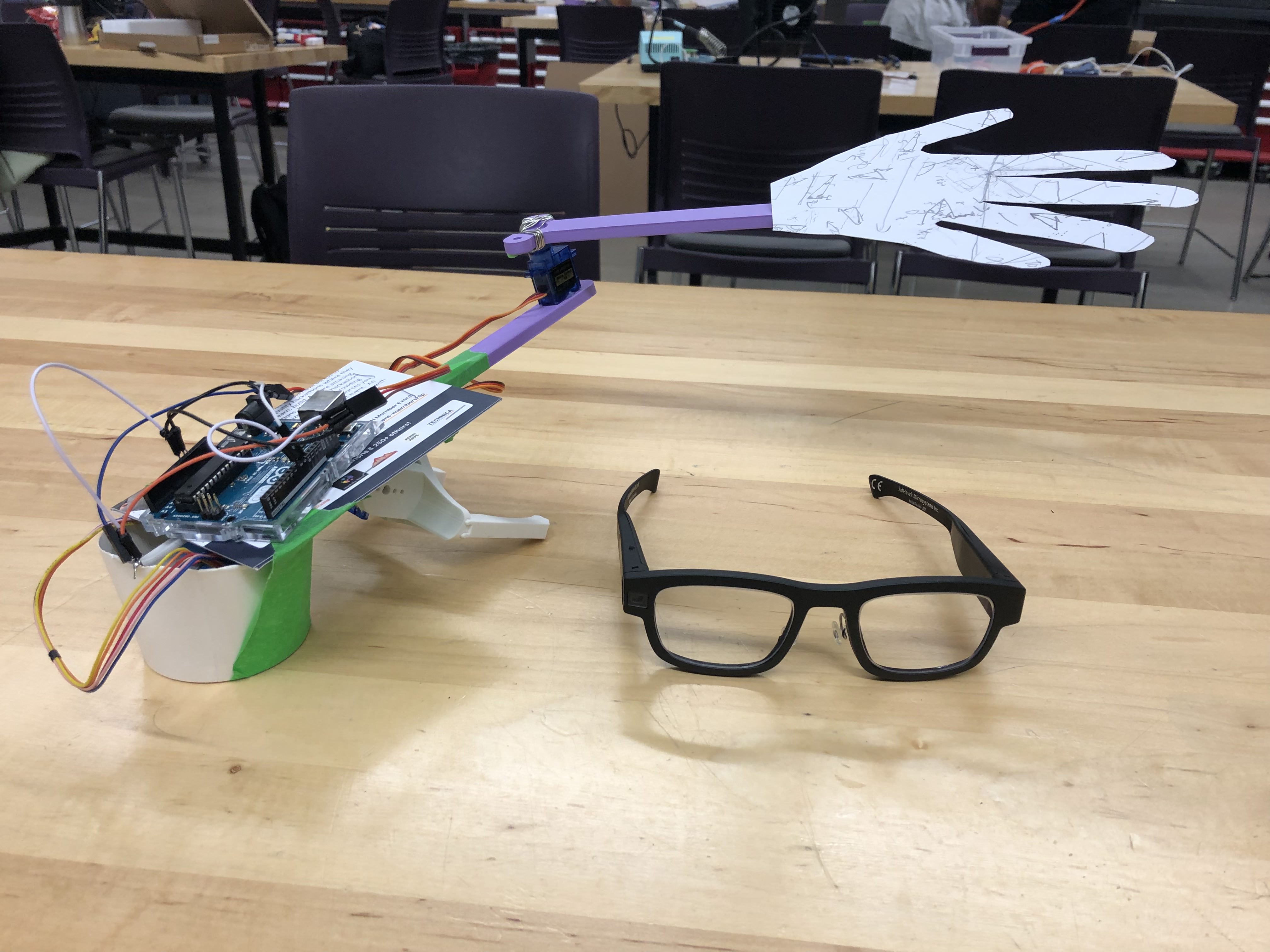
We built a 2-jointed robotic arm to allow you to pick up objects at a competent distance, and at any angle. Simply wear the arm on one of your wrists, and it can retrieve objects for you ! With eye tracking, we are able to extend an arm in a specific direction. Through fine motor motion profiling and angle calculations through inverse kinematics, we were able to allow the arm to have free range of motion limited only by its length.
How we built it
3D Printing, Arduino, Adhawk, a lot of wires, and creativity. Using Arduino's software, we control the robotic third arm. Data from the Adhawk glasses is transmitted and controls the arm's movement.
Challenges we ran into
Faulty raspberry pi - apparently our pi wasn’t getting enough power but we didn’t notice it until several hours into troubleshooting. This caused difficulties with ssh, internet capabilities, etc. No actual robotic parts - all 3D printed or recycled Limited hardware - though we were provided with vast amounts of resources at Hack the North, some basic tools were unavailable (yes, why do they offer oscilloscopes but not screwdrivers?)
Accomplishments that we're proud of
Trinity uses powerful eye tracking software to control the creative hardware! Figuring out the math behind the two-jointed arm movement
What we learned
"Sometimes you need to adapt... or sleep" - Our team, HTN 2023 36-hour hackathon? Aim to finish in 12 hours. Hardware always throws you a curveball.
What's next for Trinity
Another axis for up/down and picking up objects. More reliable design (mounting mechanism), more precise movements and eye tracking.
Built With
- adhawk
- arduino
- math
- motors
- python
- raspberry-pi



Log in or sign up for Devpost to join the conversation.