



Inspiration
Our goal is to reduce the usage of herbicides and foster a fair playing field for non-GMO and organic farmers.
What it does
AgroBot autonomously detects weeds and removes them using a mechanical robotic system. This reduces the need for herbicides and reducing the human cost in maintaining crops. AgroBot also features a web dashboard that allows for real time monitoring of AgroBot and the fields health.
How we built it
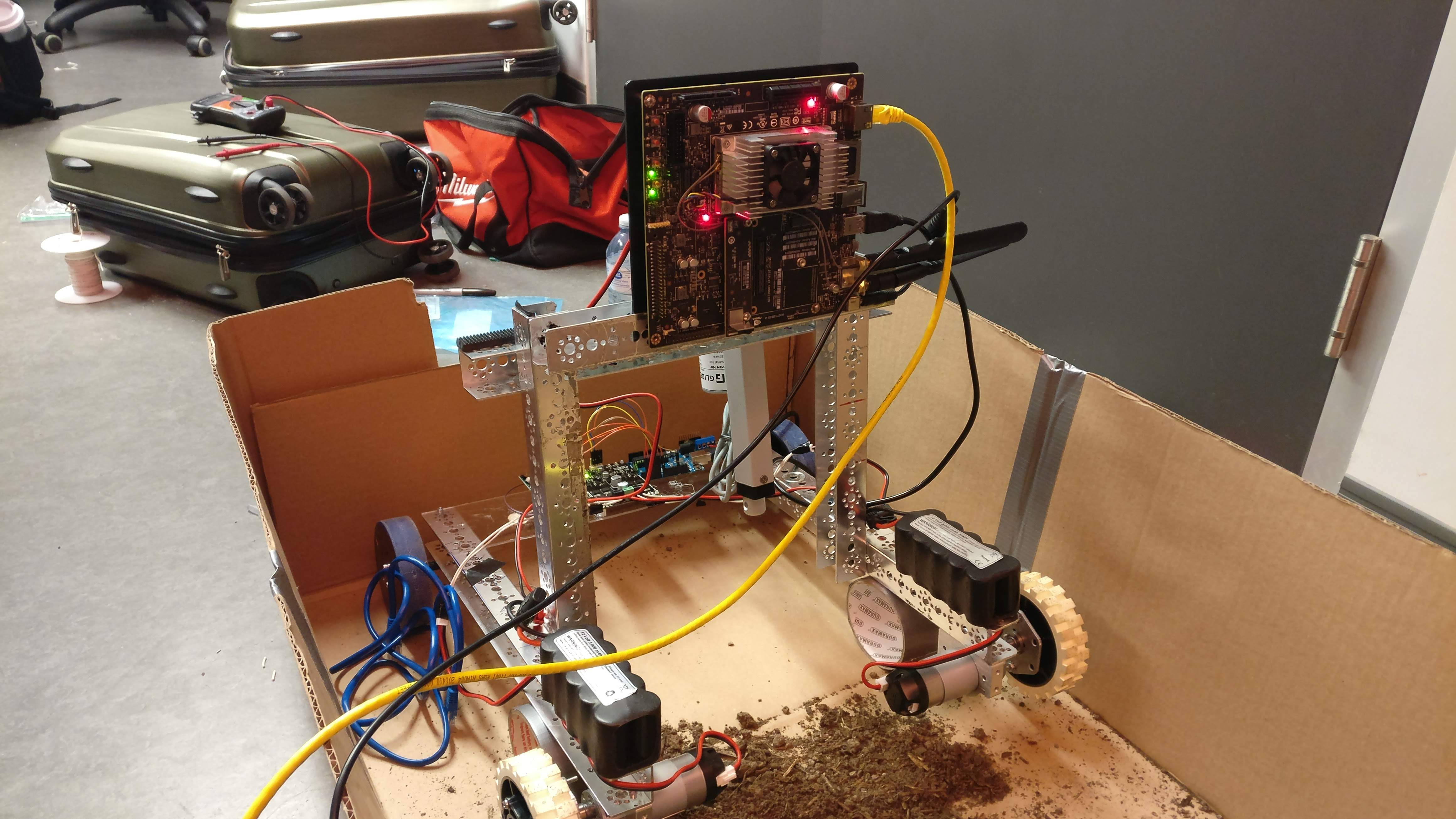
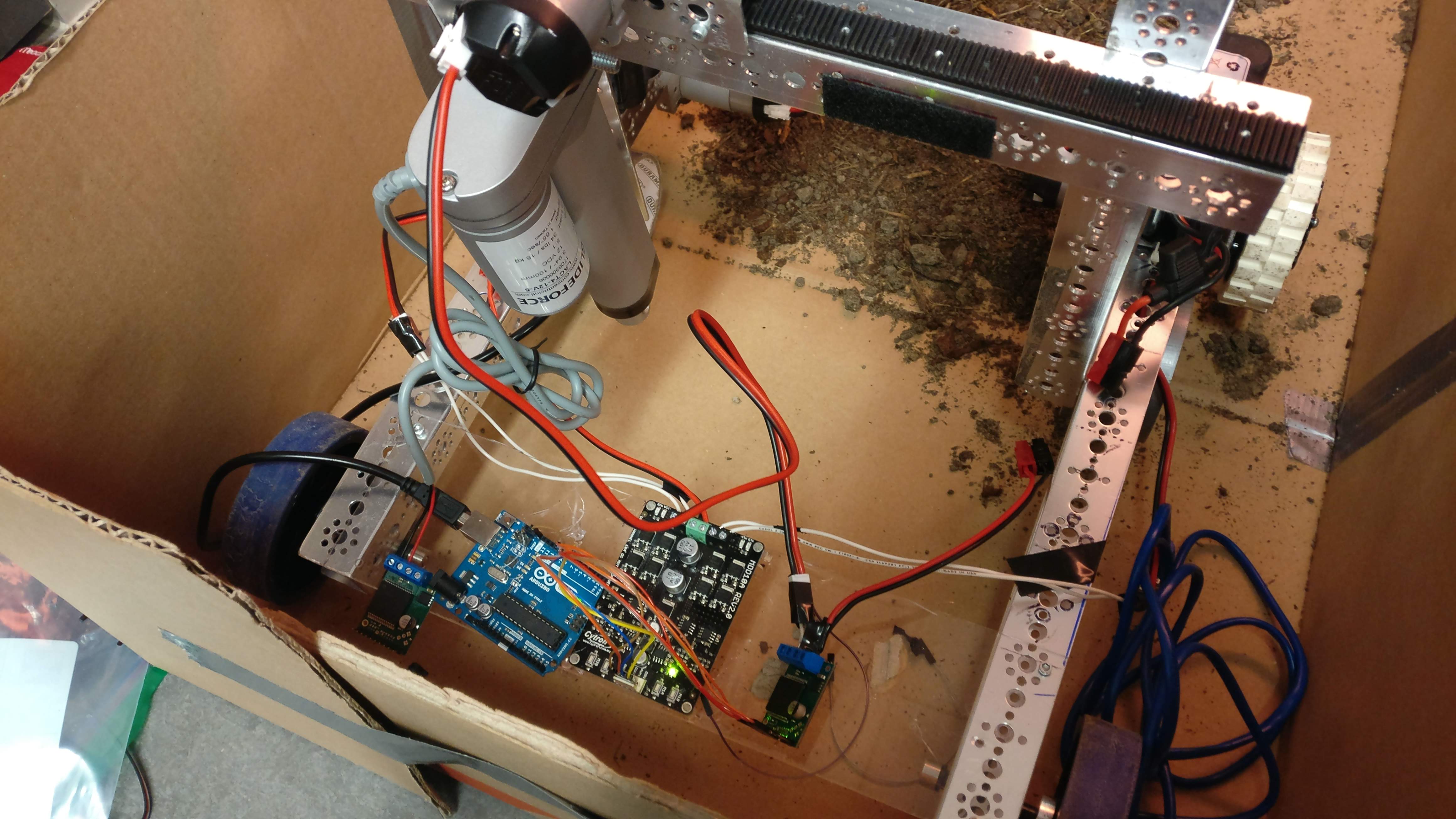
AgroBot uses the Nvida Jetson TX2 running the Robot Operating System (ROS). Using the TX2's on board camera and DarkNet neural network platform using YOLO, AgroBot is able to visually detect weeds. Then using AgroBots set of motors and linear actuator, the weed is then forced from the ground. AgroBot also uses a mobile phone attached to the robot for enhanced geolocation reporting.
The online dashboard and systems for AgroBot were built using React and Firebase. The online dashboard provides a real time live stream of weed detection, location, real time graphs on performance and the ability to control AgroBot. The online dashboard can rearranged, re-sized and reformatted by dragging and dropping panes. The online dashboard is also protected using Firebases authentication systems.
Challenges we ran into
The interfacing between AgroBot mechanical systems and software systems were a very complex challenge. We also blew a PWM board with 4 hours left and had to build an alternative board using an Arduino UNO.
Accomplishments that we're proud of
All the hardware and software integrations required to get AgroBot to work within the time span of Hack the North.
What we learned
We learned lots about manufacturing with limited tools within a tight timeline. We also gained lots of experience with DarkNet and with training ML models and interfacing with them on the TX2.
What's next for ArgoBot
ArgoBot would need to be beefed up mechanically in order to better withstand the challenges of normal farming.
Built With
- android
- arduino
- c++
- firebase
- google-cloud
- javascript
- kotlin
- python
- react
- ros
- victory




Log in or sign up for Devpost to join the conversation.