Inspiration
Our inspiration was based on a car that would provide a better experience for people, whether it be for money expenses or their lives.
What it does
It is a self automated car that detects collision before it happens and prevents impact by turning away from the body.
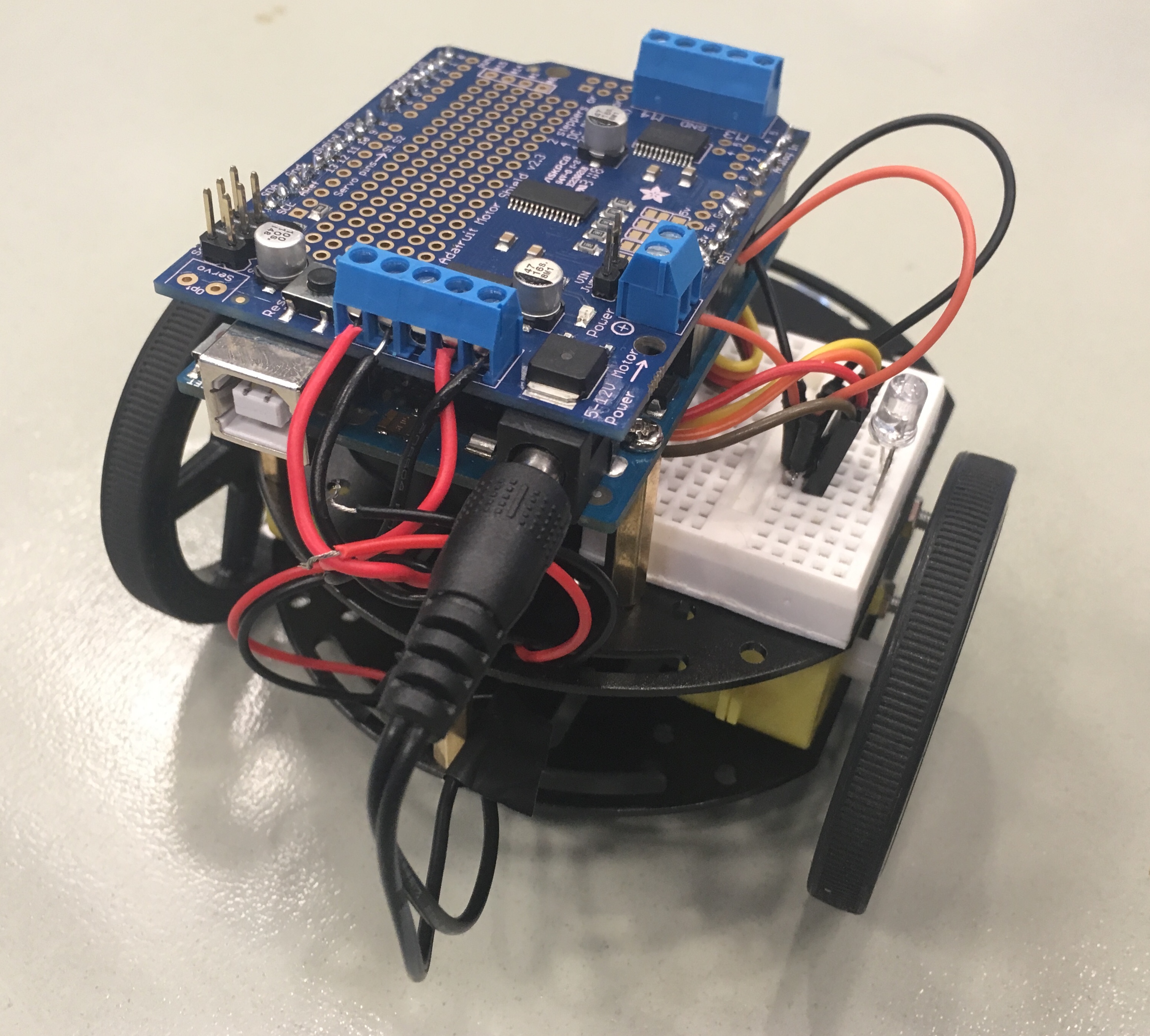
How we built it
With creativity and a variety of materials in mind, we built the car from scratch gathering parts as we went without a guideline.
Challenges we ran into
Programming the car to move was challenging because it was our first time working with Arduino IDE and had no prior instructions on how to code it. We relied on many different sites and YouTube videos to get a basic understanding and simplified coding.
Accomplishments that we're proud of
We were proud of accomplishing what we set our mind to and learning a lot in the process of building our robot. It was our first time programming with Arduino IDE and the build itself was all made from our view of the robot with no set of instructions.
What we learned
We learned how to use specific hardware and software. The sensors were a difficult thing to code, oftentimes sites would use different languages than what we needed and would mix and jumble up our code. We managed to go through and eliminate what didn't work and fix any errors.
What's next for Arduino Turtle Car
Creating an improved version and then hopefully making it large, safe and approved for people use.

Log in or sign up for Devpost to join the conversation.