-
-
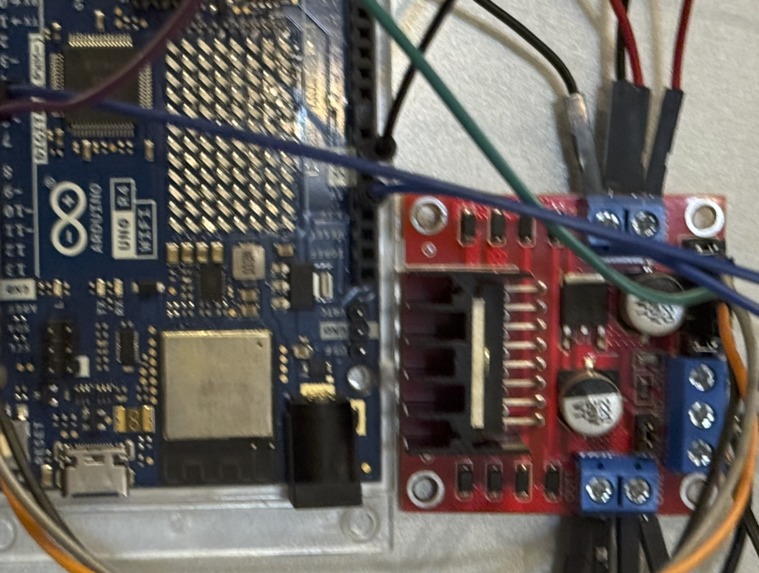
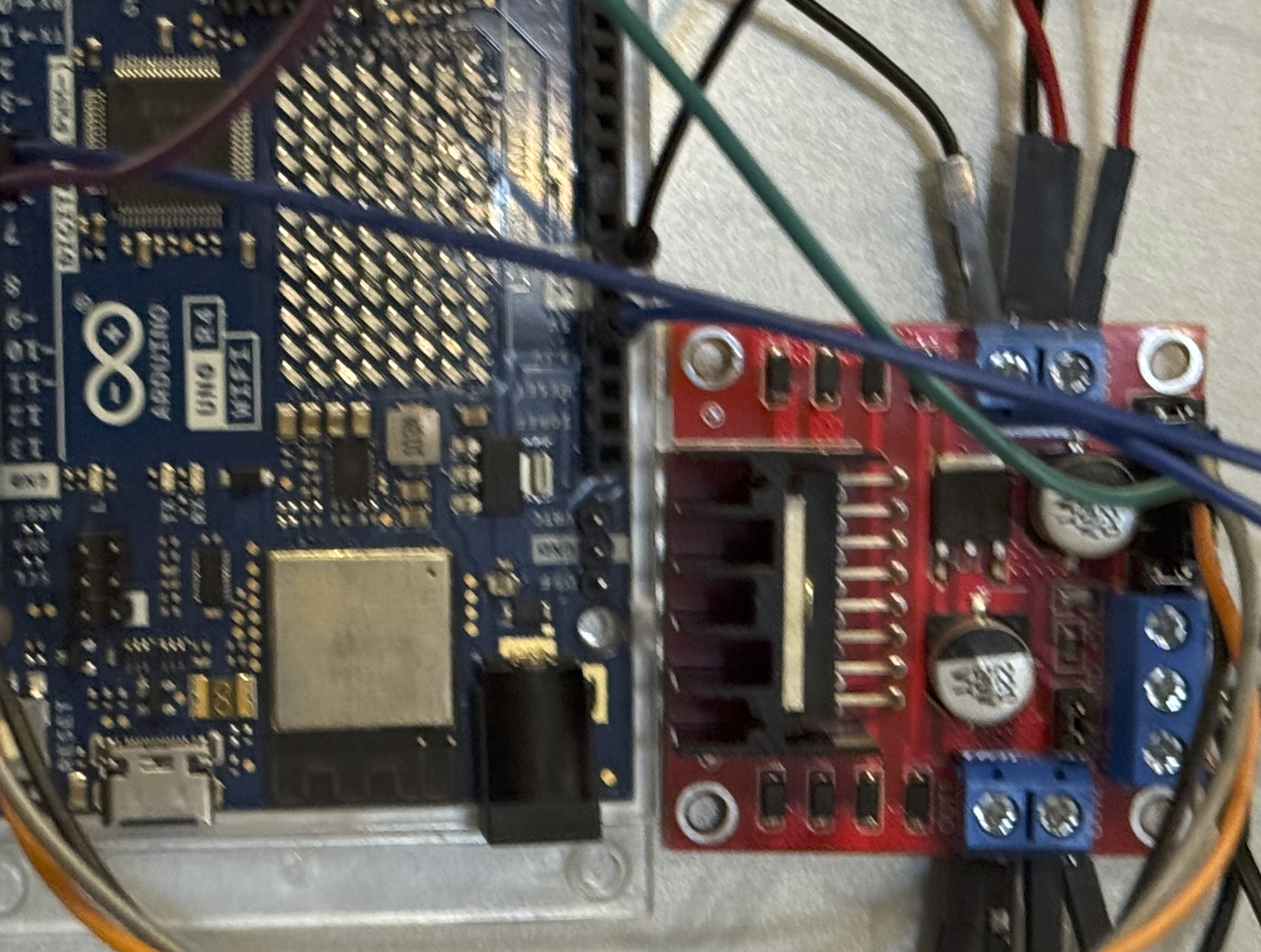
L298N Motor Driver + Arduino Uno
-

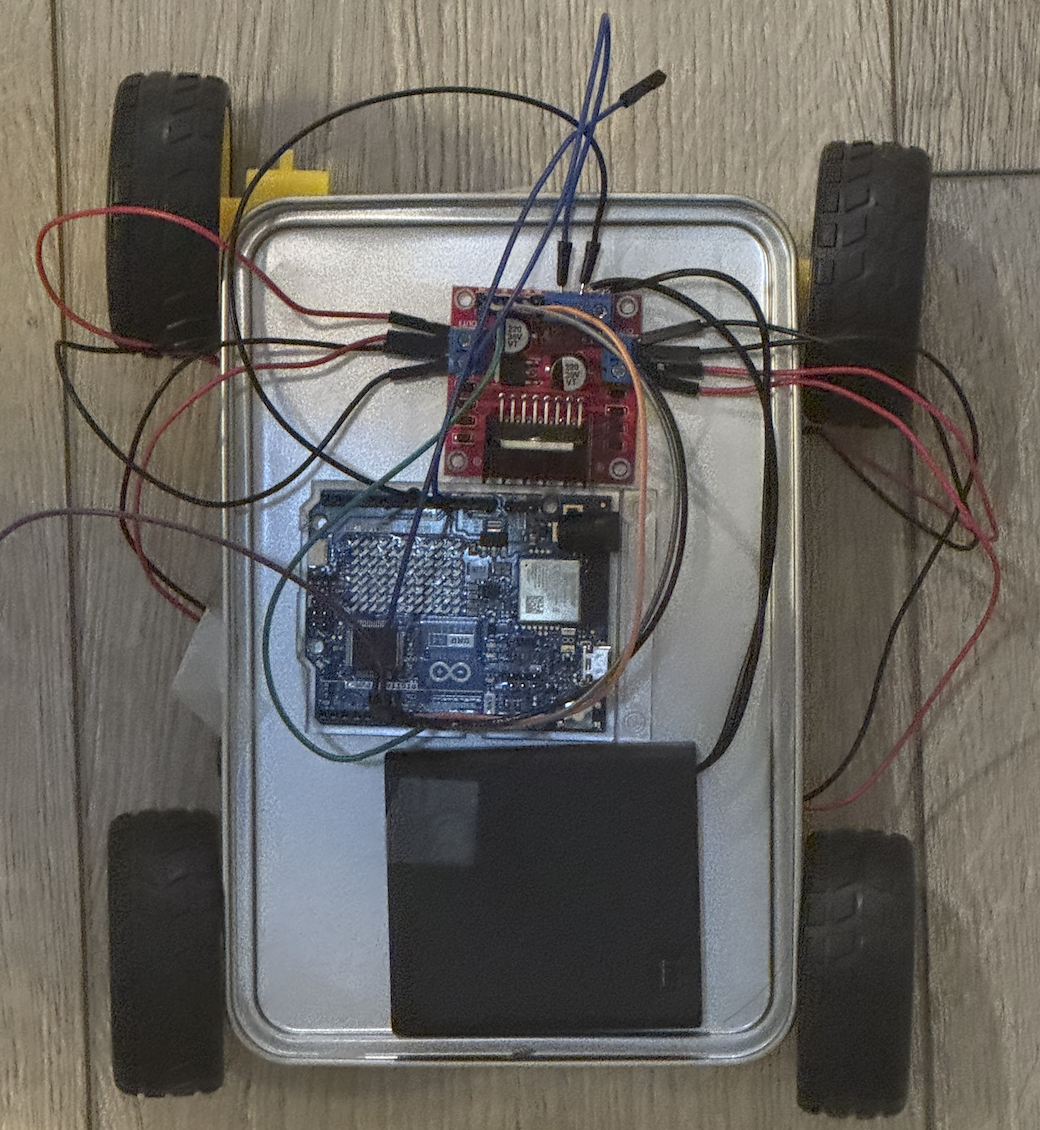
Bird's Eye View of Robot Car
-
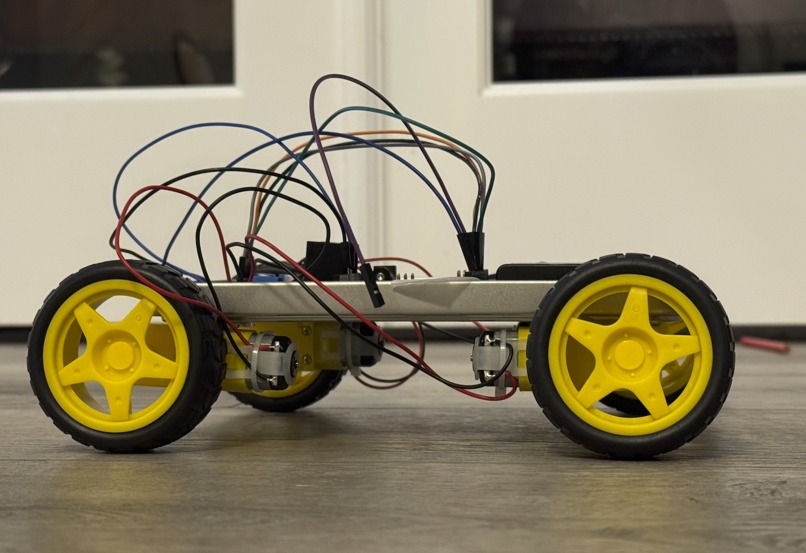
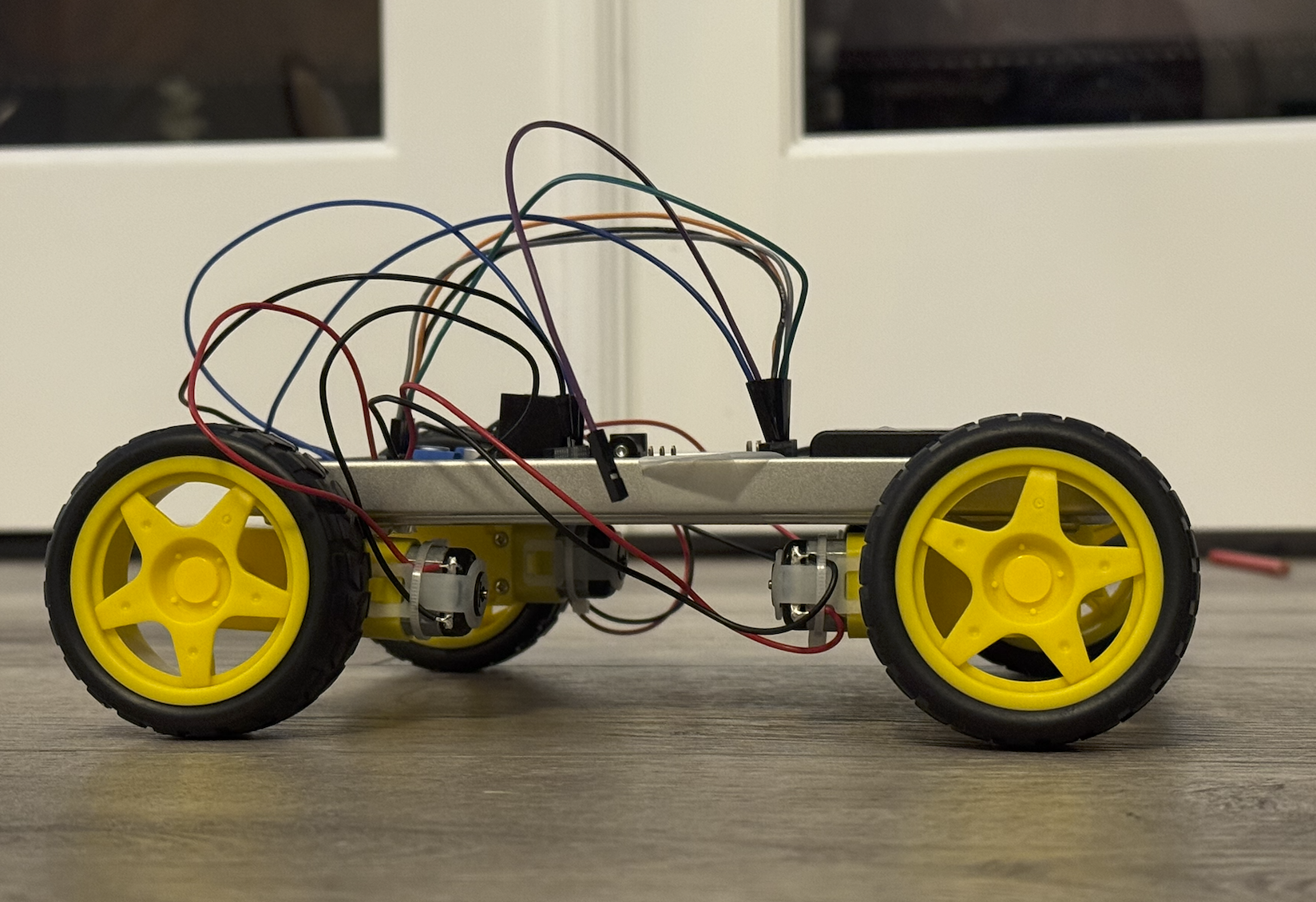
Side View of Robot Car
Inspiration:
I have always been interested in robots and how code can bring machines to life. Building a robot car that I can program to move in directions really caught my attention. I wanted a hands-on project where I could combine electronics, coding and mechanics. Something that lets me see my work in action. The Arduino Smart Robot Car project is what I decided to take on.
What it does:
Our robot car is a four-wheel vehicle that can be controlled by an Arduino.
It can move forward backward turn left or turn right.
The cars movement is controlled by a motor driver connected to four DC motors.
All wiring is powered by a battery pack.
Although it does not have sensors yet it is a starting point for exploring automation and robotics.
How we built it:
We started by gathering the components: an Arduino UNO, a red L298N motor driver, four DC motors, a 6× AA battery pack and jumper wires.
The battery powers the Arduino via the battery 5 V wire.
The Arduino controls the motor driver through pins D7–D10 for direction.
Motors are paired so that the left-side motors share one driver output and the right-side motors share the other.
We left the ENA and ENB jumpers on so the motors would always run at speed.
Once the wiring was complete we wrote Arduino code to move the car in all directions and tested it step by step adjusting connections as needed.
Challenges we ran into:
The project was not without its problems.
At first the motors. Moved weakly because the battery pack was too weak causing the Arduino to reset. Swapping to a 6× AA battery pack solved this issue.
Another challenge was that one side of the car initially moved backward so we had to swap the motor wires on that side to fix the direction.
Managing all four motors and keeping the wiring organized was also tricky. Labeling wires and planning connections ahead of time helped a lot.
Accomplishments that we're proud of: By the end of the Arduino Smart Robot Car project our robot car could move forward backward and turn smoothly exactly as we planned. It was incredibly satisfying to see the Arduino code we wrote controlling real-world motors. We’re proud that we built a functioning robot car from scratch that demonstrates how programming and electronics work together.
What we learned: We learned a lot about circuit design, motor control and programming logic. We also gained experience with power management, including why a common ground is crucial and how to safely supply enough current to motors without damaging the Arduino. On the coding side we learned how to use Arduino pins to control motor direction and how to combine code with real-world timing and motion. Overall it gave us a foundation in robotics.
Whats next, for Arduino Smart Robot Car: Next we plan to upgrade the Arduino Smart Robot Car with sensors to make it autonomous.
- We plan to explore obstacle avoidance or line-following behavior.
This project has opened up lots of possibilities. We’re excited to keep improving it and make it even smarter.
Thank you


Log in or sign up for Devpost to join the conversation.