Inspiration
Lineman and Utility workers have one of the dangerous jobs in the world, one false move and they can be severely injured or killed. one of the biggest issues that they face is the unknown status of a line that is on the ground. An energized powerline line can kill a man from over 100 feet away which makes approaching it with conventional meters and monitoring equipment, we saw a need for a tool that could keep workers out of this danger zone so we came up with the idea to build a remote control terrain robot that would be fitted with a set of sensors to detect if a line is live.
What it does
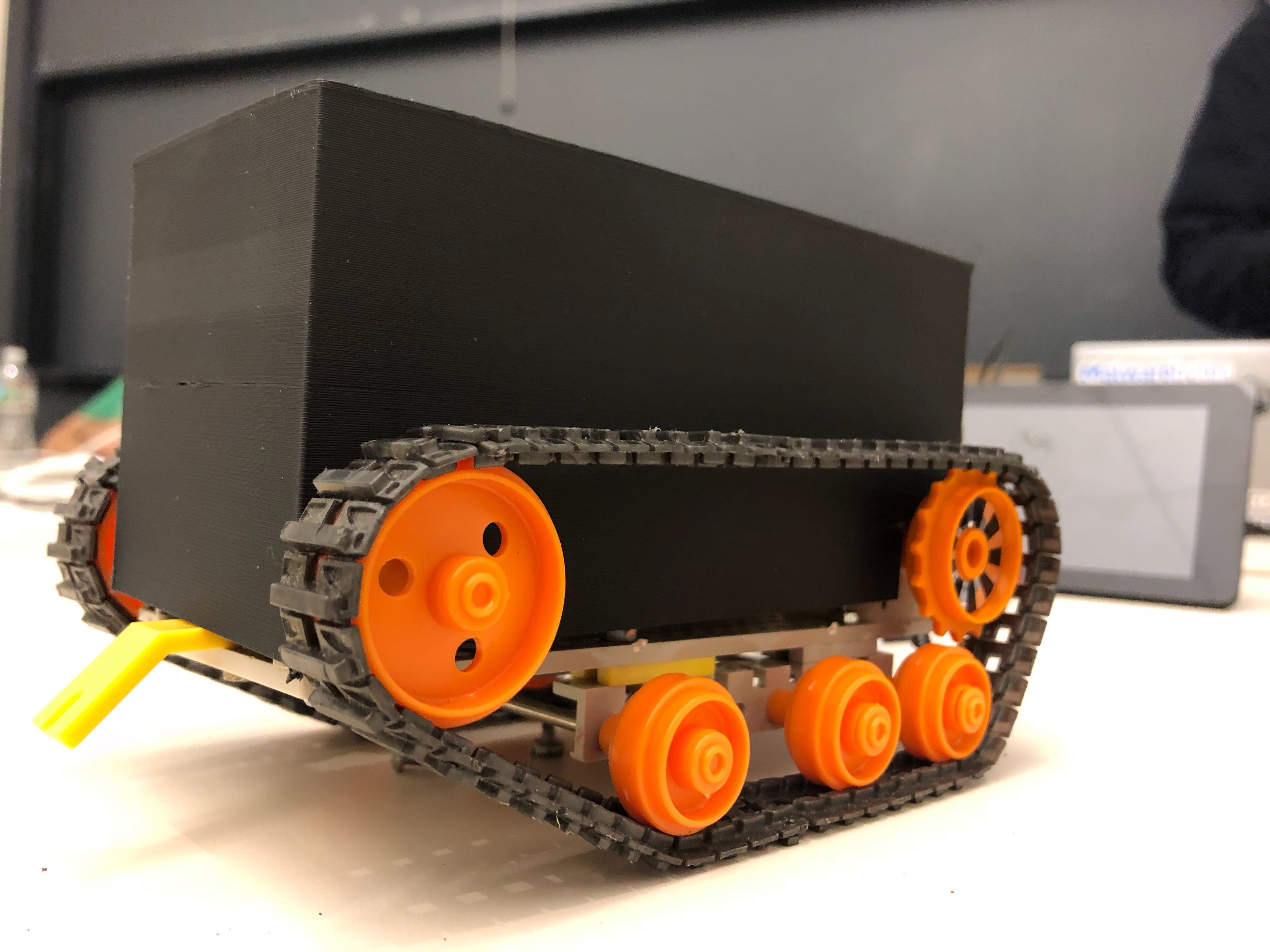
ArcFault is an all-terrain robot that can be sent into a dangerous situation by a utility worker and detect if voltage is present in the line, in order to keep a human out of a potentially dangerous situation.
How we built it
This particular proof of concept is built using a small robotics chassis and an Arduino to drive and detect the presence of voltage based on disruption to the magnetic field within the vicinity of the robot. and relay that data to the operator via wireless communication.
Challenges we ran into
As for challenges this was one for books, there were challenges at every corner of this project, we had to deal with everything from defective and missing hardware to our team's lack of experience with Arduino and microcontroller hardware. All of this compounded with the lack of time in a 24 hour hackathon made for a very difficult ad stressful event.
Accomplishments that we're proud of
Being able to take an idea from concept to reality is one of the most rewarding things that you can do. We're proud of how far our team got with our project despite the challenges and setbacks we faced. We came into this hackathon without a large amount of experience involving Arduino and microcontrollers, and in the end, we managed to get a prototype that can move and sense changes in electromagnetic frequency.
What we learned
As a group, we learned a lot about the construction and execution of a working prototype. Putting our project together during the final stretch of making really pushed our limits as a team. We learned about constructing Arduinos using plastic chassis, using multiple microcontrollers to transfer data between different parts of the Arduino, figuring out how to wire up our project using a breadboard, and controlling motors in a meaningful way to get our chassis to move.
What's next for ArcFault
ArcFault plans to expand and adapt to the coming future. As a team, we plan to keep our eyes on upcoming technology to improve our project. We'd like to incorporate Wireless communication using the Adafruit microcontroller to communicate our readings remotely. We'd also like to incorporate some kind of controller to drive the chassis, using four or eight-way input to control the chassis.










Log in or sign up for Devpost to join the conversation.