-
-

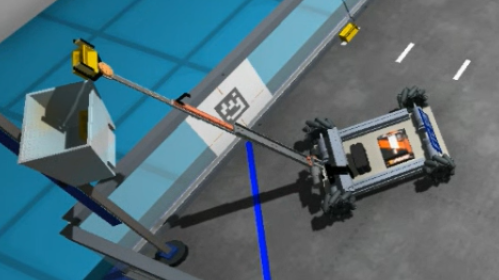
Here, our Robot in autonomous mode is dropping a sample into the low basket!
Inspiration
Pushed boundaries of what we could achieve with FTC Sim. Wanted to improve problem-solving and robotics skills. Goal: Functional robot capable of smooth Autonomous and TeleOp tasks.
WhatItDoes
Autonomous: Drives to sample area, collects samples, deposits in low basket. TeleOp: Manual control with keyboard for forward, backward, and rotation. Claw mechanism grabs/releases objects.
HowWeBuiltIt
Autonomous: Programmed sample collection and basket deposit. TeleOp: Initially used "break loop" logic for key inputs → caused freezing and delays. Fixed by using iteration-based loops to continuously check key presses. Claw Mechanism: Struggled with precision, tuned motor power to improve accuracy.
Challenges
Inconsistent Key Inputs: Breaking loops for keys caused lag/freezing. Solved using iteration inside while (opModeIsActive). Claw Precision: Motors weren’t precise → calibrated power and positioning. Movement Issues: Minor motor inconsistencies → fine-tuned settings to smooth movements.
Accomplishments
Fixed TeleOp with continuous key-checking logic. Improved claw precision for reliable grabs. Debugged motor inconsistencies for smoother navigation.
WhatWeLearned
Iteration > breaking loops for handling continuous inputs. Motor calibration is key for precision. Debugging requires testing different logic and fine-tuning values.
WhatsNext
Improve claw precision further. Add distance and color sensors for better navigation. Optimize Autonomous efficiency (faster sample collection). Use this experience to build/program a physical robot for competitions.
Built With
- ftcsim
- java



Log in or sign up for Devpost to join the conversation.