Inspiration
The theme of recovery inspired us to think about recovery after natural disasters, specifically floods. We wanted to make a product that can deliver supplies to those in need to ease the flood recovery process.
What it does
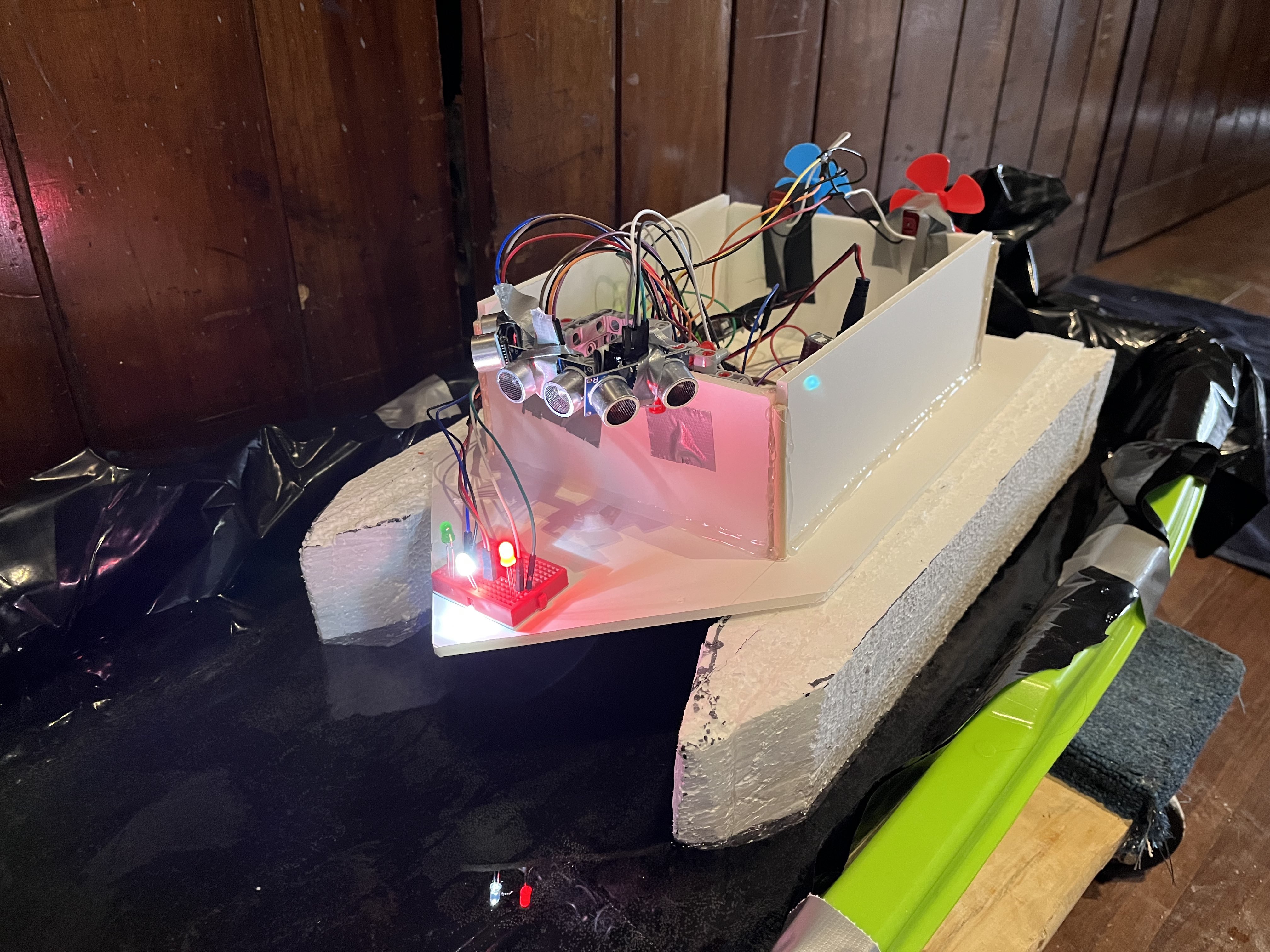
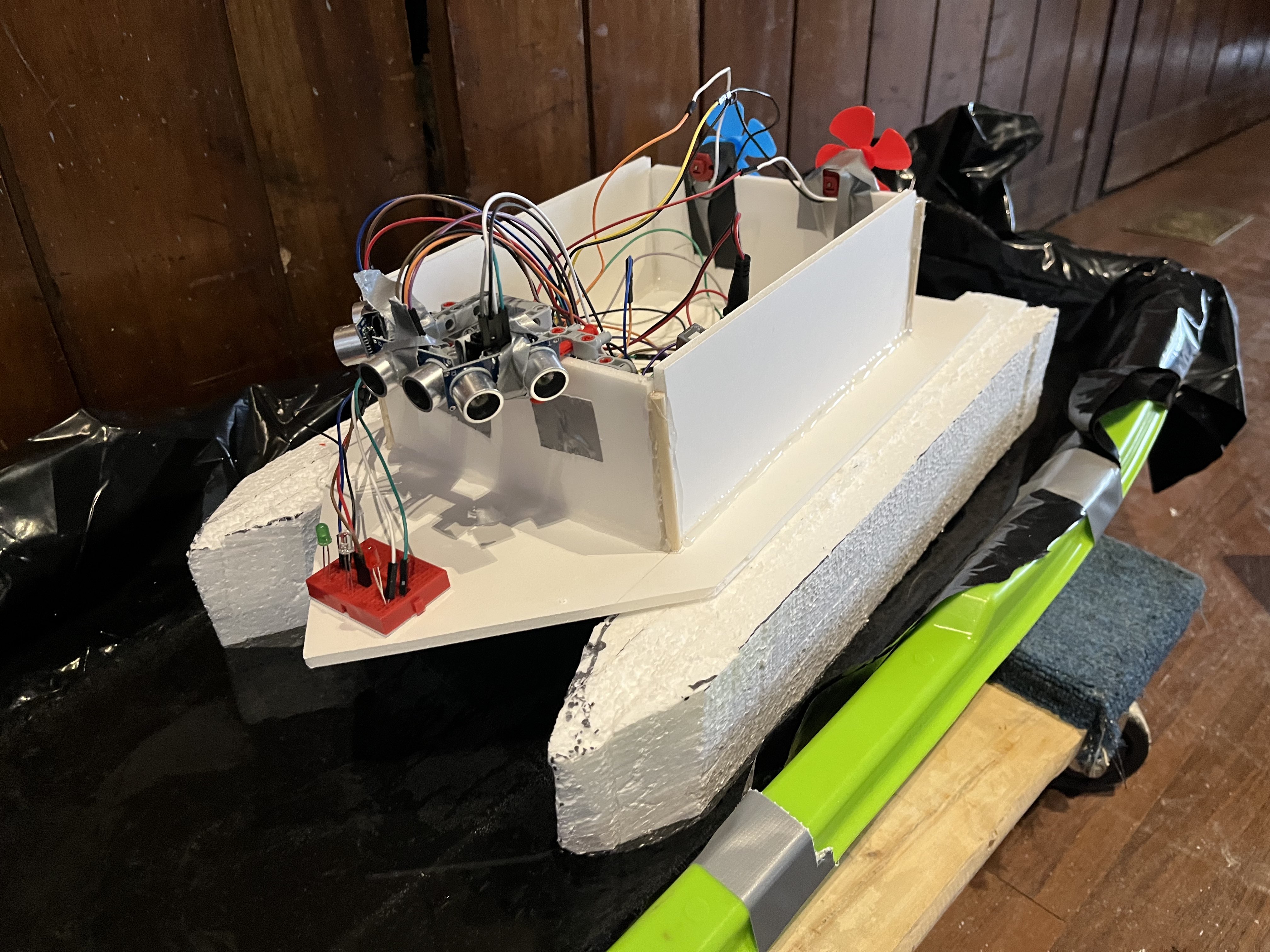
AQUA autonomously navigates through and around obstacles. Further implementation would include GPS-based navigation.
How we built it
We used ultrasonic sensors to detect obstacles with an Arduino Uno as our microcontroller. Fans are elevated above the water line to provide versatile propulsion, and our system uses pontoons to traverse shallow water.
Challenges we ran into
A big issue we had was implementing communication systems. While we initially wanted to use Bluetooth or radio transceivers to add remote-control capability, the short timeline and limited technology available made this not feasible.
Accomplishments that we're proud of
We've successfully implemented our autonomous algorithm, which searches for paths around obstacles. Paired with GPS navigation capability, this could be extraordinarily useful in disaster situations.
What we learned
We learned the basics of implementing sensors to collect inputs, and building algorithms that work.
What's next for Aquatic Universal Aid (AQUA)
We're going to take it into the Charles River, and see if it's up to the challenge.

Log in or sign up for Devpost to join the conversation.